PangCe Medical: Industrial Robotics Pioneer Crosses Over to Develop Ultrasound-Guided Venipuncture Robot

Puncture Robotic
Medical Robot Developer
The Global Pandemic of COVID-19: Healthcare Systems Worldwide Face Significant Challenges in Responding to the Outbreak. Undoubtedly, this wave of the pandemic will shape the future direction of global healthcare systems. Currently, architects and healthcare consultants are discussing how to redesign modern hospitals to enable healthcare systems to better respond to crises.
From one perspective, during the early stages of the COVID-19 outbreak, healthcare workers had extensive contact with infected patients while lacking adequate protective measures, resulting in a high infection rate among medical staff. During the pandemic, automated equipment such as consultation robots, disinfection robots, and logistics robots became essential necessities for hospitals. This indicates that, to reduce the risk of infection in the daily work of hospital personnel, the public health system will evolve toward greater informatization and automation.
VCBeat (WeChat ID: vcbeat) has learned that Puncture Robotic, from the Central Research Institute of Harbin Institute of Technology Intelligent Technology, has developed an ultrasound-guided medical puncture and blood collection robot. Driven by the vision of reducing the risk of infection for nurses in infectious disease departments during blood sampling, this robot enables automatic collection and automated sorting and organization of blood specimens, thereby helping hospitals achieve fully automated laboratory testing.
Hagong Intelligence is a high-tech listed company in China focused on the manufacturing of high-end intelligent equipment and AI robotics. With extensive R&D experience in robotics, the company adheres to the core development philosophy of “AI + ROBOT” to build a comprehensive robotics ecosystem.
Although Harbin Institute of Technology Intelligent has completed its layout across the entire industrial robot value chain, the medical and industrial sectors are worlds apart. How does Puncture Robotic transfer its R&D experience from industrial robots to the medical field? And how can blood collection robots achieve true practical implementation in clinical settings? VCBeat interviewed Xie Lei, CEO of Puncture Robotic, and Zhang Zhaodong, CTO of the company.
The Puncture Robotic team has long been engaged in the robotics industry, yet they believe that corporate development must go hand in hand with social responsibility. The technologies they have accumulated should be applied to the scenarios where they are most needed.
“We ultimately chose the field of medical robotics as a new area for R&D exploration, leveraging our accumulated expertise in robotics to address challenges in the healthcare sector.”
During its research, the team at Puncture Robotic found that medical robot applications can be broadly categorized into four major directions: first, robotics + therapy; second, robotics + diagnosis; third, monitoring; and fourth, inspection and testing. Xie Lei believes that in the therapy sector, many leading companies have already clustered, with Intuitive Surgical, the maker of the da Vinci Surgical System, standing far ahead of the competition. In the diagnosis sector, the focus leans more toward AI software. The monitoring sector is predominantly hardware-driven. Ultimately, Puncture Robotic chose to enter the diagnostic and testing segment, a niche area for intelligent robotic applications that remains relatively untapped.
Initially, the Puncture Robotic team identified that the step most amenable to robotic integration within clinical laboratories was the pre-analytical processing of blood tubes following phlebotomy. Processes such as tube mixing and labeling allow for the rapid adaptation of industrial robotic products to medical settings. However, the Puncture Robotic team aims to develop products that are deeply integrated with clinical workflows, rather than simply replicating industrial solutions in the healthcare sector.
During the research, the Puncture Robotic team further discovered that nurses face a significant risk of infection from needlestick injuries during blood collection. Xie Lei stated, “We aim to develop a blood-drawing robot to reduce the risk of infection for nurses, particularly those in infectious disease departments and hospitals specializing in infectious diseases. Our survey of healthcare workers revealed an average of 0.75 needlestick injuries per person annually, with over 60% of physicians working under radiation exposure reporting illness.”
In addition to potential risks, nurses face a substantial workload in blood collection. Xie Lei, CEO of Puncture Robotic, told VCBeat: “Among the top 100 tertiary Grade A hospitals, the average daily number of blood draws reaches 6,000; each healthcare professional serves an average of 150 patients per day, and laboratory technicians often have to assume the role of phlebotomy nurses in many hospitals.”
Needle insertion is a fundamental skill for nurses. However, for robots to learn and perform this procedure, they must first possess human-like “visual perception” and “judgment capabilities.”
Zhang Zhaodong stated that medical scenarios impose high requirements on robots. The team at Puncture Robotic has deep expertise in mechanical control and artificial intelligence, with the primary challenge they overcame being the ability to achieve precise puncture.
“Given our extensive expertise in robotics, we initially believed that designing a blood-drawing robot would not be particularly challenging; it seemed sufficient to simply simulate the process of a nurse performing venipuncture and implement it using mechanical control principles. However, during the actual R&D and design phase, we discovered that the real challenges lay in vein selection and puncture control. Due to variations in vein diameter, depth, and trajectory, the required puncture depth differs accordingly. In industrial robot design, the task is merely to move the robot from point A to point B, whereas in the design of a blood-drawing robot, the system must make precise judgments and decisions.”
To enable the blood-drawing robot to visualize blood vessels, Puncture Robotic has extensively researched machine vision AI technologies and integrated two such technologies to achieve precise venipuncture.
First, infrared imaging technology is employed to capture data on vascular trajectories by detecting the reflection of infrared light from hemoglobin within blood vessels, followed by the application of ultrasound imaging.
“Infrared imaging produces images akin to a two-dimensional GPS; while it can display specific coordinates on the surface, it cannot determine whether there are underlying structures beneath. During blood collection, nurses can gauge the depth of needle insertion into the vein by tactile feedback, whereas machines lack this perceptual capability.”
To enable the robot to perceive blood vessels in a three-dimensional and precise manner, Puncture Robotic has decided to incorporate ultrasound imaging into its imaging module.
The integration of ultrasound imaging posed significant challenges for the Puncture Robotic team, as most members of the technical team lacked experience in interpreting medical ultrasound images. We engaged numerous medical ultrasound experts within the industry to enrich our expertise and established a long-term collaboration focused on ultrasound-guided puncture applications.
“It is well known that ultrasound imaging requires medical personnel to position the probe correctly; images cannot be obtained by arbitrarily placing the probe anywhere. In blood-drawing robots, the ultrasound probe must maintain a specific angle relative to the blood vessel to acquire images. We have devoted significant effort to translating these clinical requirements into engineering specifications.”
The application of ultrasound imaging is the area where Puncture Robotic’s R&D team has invested the most time and resources. With ultrasound images, cross-sectional views of blood vessels can be obtained, providing information on vessel diameter and depth, which helps the phlebotomy robot establish three-dimensional coordinates of the blood vessels.
By integrating infrared and ultrasound imaging, the Puncture Robotic system enables rapid 3D image localization under ultrasound-guided positioning. It quickly calculates the optimal blood vessel based on the imaged vascular distribution map. In terms of vessel segmentation, it detects and segments the diameter and location of arteries and veins using ultrasound images.
In terms of spatial motion control, by fusing image and ultrasound data, the robot can calculate the motion trajectory and complete needle insertion for blood sampling.
The integration of two image recognition technologies significantly enhances the precision of Puncture Robotic’s needle insertion. Through precise calculations, the blood collection robot can control the needle entry angle and puncture depth, resulting in less pain for patients compared to manual venipuncture.
To achieve a higher degree of simulation fidelity in needle insertion compared to manual phlebotomy by nurses, Puncture Robotic has incorporated a puncture force feedback control module. This module enables real-time monitoring of variations in puncture torque and motor stall data, facilitating algorithmic closed-loop control for vision and motion components, thereby enhancing the stability of the puncture procedure.
“In the area of haptic feedback, we also devoted considerable time to research and development. We asked nurses how they achieve successful venipuncture on the first attempt, and they told us that blood vessels beneath the skin produce a distinct sensation; specifically, there is a ‘loss-of-resistance’ feeling once the needle punctures into the vessel. It is challenging for machines to capture this subtle sensation. Our solution was to incorporate numerous sensors to predict changes in force.”
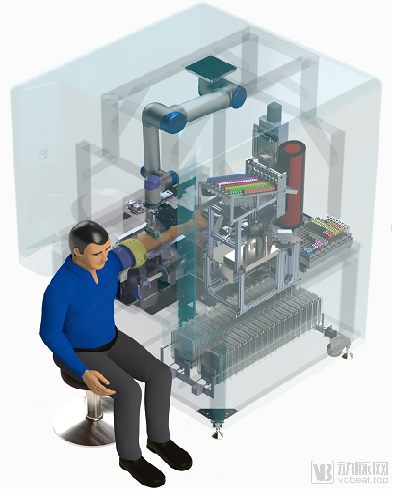
Puncture Robotic’s products are still under research and development and iterative improvement. Currently, Puncture Robotic’s system can complete blood collection within one minute. At present, Puncture Robotic’s blood-collection robot comprises six major systems:
Puncture Blood Sampling System: Enables guided puncture following AI-based medical image computation;
Electronic Tourniquet System: Enables replacement of the contact membrane and provides constant-force compression to the arm;
Test Tube Management System: Enables functions such as test tube labeling, sorting, and mixing.
Consumables Management System: Automatically performs needle replacement, disinfectant replacement, and coupling gel replacement;
Hemostasis Care System: Automatically performs hemostatic compression;
Human-Computer Interaction System: Achieves automatic data verification through the HIS/LIS systems, while simultaneously providing demonstration and teaching displays.
The system covers all aspects of the blood collection process through six major subsystems. It ensures standardization of venipuncture and blood sampling, guarantees that the entire workflow complies with blood collection standards, and incorporates error-proofing monitoring; it also prevents cross-infection between patients and healthcare workers throughout the process, as well as needlestick injuries. In terms of automation, the entire blood collection and venipuncture process is fully autonomous, requiring no human intervention. The integration of multiple technologies enables Puncture Robotic’s products to accommodate patients with various special physical conditions, such as obese and elderly individuals.
Regarding implementation scenarios, Xie Lei stated that, as a new product, the Puncture Robotic team aims for its initial deployment to be in infectious disease hospitals and departments.
“The global outbreak of COVID-19 has revealed the formidable threat posed by infectious diseases. Fever clinics represent a high-risk work environment. By managing fever clinics in strict accordance with isolation and infection-reduction standards, blood collection robots can significantly mitigate risks. Backed by Harbin Institute of Technology’s intelligent technology initiatives, our primary motivation in developing this product was to create social value.”
Nurses often need to perform blood collection while moving across various scenarios; therefore, Puncture Robotic is also developing a portable blood collection robot. Globally, blood collection is one of the most common medical procedures. However, its prevalence does not imply that it is a simple task.