Virtual Incision Files for IPO: Pioneering 900g Miniature Surgical Robot MIRA Set for Space and Global ORs

Virtual Incision
Surgical Robot Developer
In recent years, thanks to the development of artificial intelligence and the integration of medical big data, the emergence of various types of surgical robots has significantly transformed our approach to surgery. With the advancement of surgical robot technology in clinical applications, clinical surgery has ushered in a new era.
Since the first surgical robot, the da Vinci Surgical System, was developed by Intuitive Surgical and received FDA approval in 2000, surgical robots have evolved to the fourth generation, enhancing surgical precision and operability while reducing intraoperative bleeding and postoperative infections.
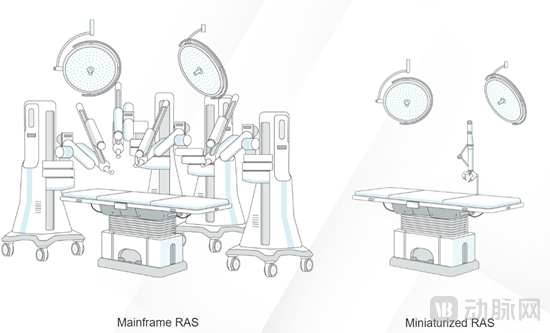
But so far, almost all theSurgical robots are bulky, complex to operate, and require dedicated operating rooms for support.. This poses a significant challenge for many hospitals, particularly those in remote areas and at the primary care level.The demand for improved accessibility and reachability of surgical robots has driven their evolution toward miniaturization and ease of operation.
Virtual Incision was founded in 2006, originating as a collaborative project at the University of Nebraska. The companyDeveloped the world's first miniaturized robot-assisted surgery (RAS) platform, offering the compact and user-friendly MIRA surgical robot system. Over the past two years, MIRA’s development has officially entered a fast track.
In 2020, MIRA received FDA Investigational Device Exemption (IDE) approval and entered the final phase of clinical trials. In November 2021, Virtual Incision secured $46 million in joint investment from Endeavour Vision and Baird Capital. In August, Virtual Incision announced a collaboration with NASA, planning to send its compact robotic-assisted surgical platform, MIRA, to the International Space Station (ISS) in 2024 for technical demonstrations to evaluate its capabilities in performing tasks such as cutting simulated tissue and manipulating small objects.
How has Virtual Incision achieved such significant progress? How did it win the favor of NASA and investors? Is miniaturization truly the future direction for surgical robots?
From “Mars Rover” Missions to Surgical Robots
Dmitry Oleynikov, Co-founder and Chief Medical Officer of Virtual Incision, graduated from the Albert Einstein College of Medicine at Yeshiva University. He is an actively practicing general surgeon specializing in esophageal surgery and minimally invasive surgery, with over 20 years of clinical experience and extensive academic achievements. Currently, Dmitry serves as the Chief of Surgery at RWJ Monmouth Medical Center and as a Professor of Surgery at Rutgers Robert Wood Johnson Medical School, while also beingPrincipal Investigator of numerous federal research grants from the National Institutes of Health, the Department of Defense, and the National Aeronautics and Space Administration, with total research funding reaching $12 million.
Dr. Shane Farritor, another co-founder and Chief Technology Officer of Virtual Incision, graduated from the Massachusetts Institute of Technology with a degree in Mechanical Engineering and currently teaches at the University of Nebraska–Lincoln. Prior to his academic career, Virtual hadKennedy Space Center, Goddard Space Flight Center, and Jet Propulsion Laboratory (JPL)learning, holds over 170 patents, and has published more than 140 peer-reviewed journal articles.
Research on surgical robots originated from a research design by Shane at the University of Nebraska concerning the “Mars Rover” mission. In this project, Shane and his colleagues built the rover together and contributed to the design that utilized solar sensors to monitor the rover’s direction of travel.
It was this design effort that caught the attention of the U.S. Army, which sought to develop several types of surgical robots capable of operating inside patients’ bodies, thereby reducing reliance on field hospital surgeries during military combat operations. NASA also hoped to develop portable surgical robots for use in space, in preparation for future long-duration space missions.
Thus, Shane secured substantial funding from NASA and the U.S. Army to commence the research and development of surgical robots.
MIRA: The World’s First Miniature Surgical Robot, Weighing Only 900 Grams
Since 2000, Shane and his research team have made more than forty attempts, continuously conducting various clinical tests on the platform, and finally developedThe World’s First Miniature Robot-Assisted Surgical Platform: MIRA
Following the development of the MIRA platform, Shane and Dmitry co-founded Virtual Incision in 2006. John Murphy joined the company in 2012 as Chief Executive Officer. Mr. Murphy holds a Master’s degree in Computer Science and an MBA from the University of Greenwich (London), the University of Chicago, and Arizona State University, and brings over 30 years of management experience in mid-sized and large enterprises.
The MIRA platform is designed to enable multi-quadrant abdominal surgery, currentlySpecializing in minimally invasive colorectal and lower gastrointestinal surgery, the fastest-growing surgical field for patients in the United States., with over 400,000 surgical procedures performed annually.
In China, colorectal cancer is also one of the three most common cancers. However, there is a significant shortage of existing minimally invasive surgical robots, and most hospitals lack the funds to purchase additional platforms. “The Mira platform aims to increase these patients’ access to minimally invasive surgery and significantly reduce the waiting time for procedures, enabling surgeons to perform operations within days,” said John Murphy.
In the future, MIRA will also be developed for hernia repair, cholecystectomy, hysterectomy, sleeve gastrectomy, and other procedures.
Furthermore, MIRA alsoReduces the number of incisions required for MIS colectomy. Traditional surgery requires four to six incisions of approximately eight inches each in the abdomen, whereas MIRA can be inserted through a single midline umbilical incision, reducing the number of incisions to two. This approach shortens the postoperative hospital stay from ten days to four days and reduces associated costs.
Enhance availability, improve robot utilization efficiency, and reduce staffing requirements
According to global surgical volume data released by the WHO, approximately 234 million surgeries are performed worldwide each year, equivalent to one in every 25 people undergoing a surgical procedure. Based on data from Frost & Sullivan, the global market size for surgical robots grew from USD 3.581 billion in 2016 to USD 8.321 billion in 2020, representing a compound annual growth rate (CAGR) of 22.6%. The market is projected to continue expanding at a CAGR of 26.2%, reaching USD 33.6 billion by 2026.
Surgical robots can help doctors achieve three major functions: minimal trauma, high precision, and reduced infection. However, currently applied surgical robots all suffer from problems such as bulky size, low efficiency, and high labor consumption. Therefore, the development of compact robot-assisted platforms has become necessary.
· Enhance availability
The large size of conventional surgical robots makes them difficult to move or set up in small rooms such as outpatient surgery centers, meaning they are typically only available at major medical centers. In China, the globally leading da Vinci Surgical System is mostly deployed only in tertiary Grade A central hospitals. Weighing just two pounds (907 grams), MIRA can easily transport robotic-assisted surgery (RAS) capabilities from one location to another, offering high mobility and improved accessibility.
· Improve the efficiency of robot utilization
For large-scale systems, each procedure requires re-establishing the surgical setup, and the prolonged setup and turnover times limit the number of procedures that can be performed in a single day. It is estimated that MIRA’s installation time can be kept within seven minutes, thereby minimizing robotic-assisted surgery (RAS) downtime to free up operating room capacity and reducing turnover time to enable treatment of more patients.
· Reduce staffing requirements
The use of large-scale equipment requires specialized training and imposes high demands on personnel’s professional qualifications; therefore, the availability of qualified staff may limit the volume of surgeries that can be performed.
MIRA consists of three components: a micro-arm, a compatible cart, and a console. It features disposable end-effectors, including bipolar graspers and monopolar scissors, and is equipped with a visualization system incorporating a camera. The camera offers automatic instrument tracking to ensure smooth surgical procedures. MIRA is designed to rotate 360 degrees,Control is achieved via the hand controls and foot pedals of the surgeon console connected to the system.During the surgical procedure, the controller filters out hand tremors and unintended movements.
MIRA Micro-Arm: The MIRA micro-arm system features a single-port, suspension-free access design, incorporating an articulated integrated camera that passes through the device’s central channel and two instrument arms for surgeon operation. It offers a service life of hundreds of hours and is designed for reuse following the recommended sterilization protocol.
The accompanying cart is a wheeled trolley that includes system support equipment, a transfer area, and storage space. It is connected to other instruments by only two cables: one for the camera and one for the micro-arm.
The console features a large surgical monitor that displays real-time video feedback from cameras, manual controllers, foot pedals, and an interactive touchscreen. The primary display presents the surgical field in high-definition resolution in real time; cameras equipped with auto-tracking capabilities can also be manually controlled. An integrated touchscreen display provides three-dimensional (3D) visualization.
Clinicians can manually input commands to operate the mechanical movements of the device, which is equipped with sensors that monitor user actions. These sensors activate only when the detected movements of the clinician correctly align with the controller. In addition to manual control, the console is equipped with four foot pedals used to control grasping, camera movement, left instrument energy (bipolar electrocautery), and right instrument energy (monopolar electrocautery).

MIRA to Conduct Technology Demonstrations on the International Space Station
Exploring the vastness of space and achieving long-duration space travel have long been humanity’s cherished dreams, whose realization hinges on the support and advancement of multiple technologies. In pursuit of this vision, NASA has begun selecting its collaborative partners.
MIRA’s groundbreaking inspiration stemmed from the “Space Rover” project developed in collaboration with NASA. Since 2000, Shane and his research team have continuously secured project funding from NASA. Since the establishment of Virtual Incision, the company has completed 11 rounds of financing, raising a total of $116 million.
Recently, NASA awarded a grant to Shane and his research team through the University of Nebraska’s Experimental Program to Stimulate Competitive Research (EPSCoR). The team aims to use this funding to facilitate MIRA’s technical demonstration aboard the space station in 2024, thereby evaluating its broad applicability.
MIRA’s initial two clinical trials were conducted in South America, setting the direction for its subsequent development. Last August, the first human trial of MIRA was jointly performed by Dr. Michael Jobst and Dr. Kelly Krier at Bryan Medical Center in Lincoln, Nebraska, where a right hemicolectomy was completed through a single umbilical incision.
“MIRA enabled 100% anatomical access in all my cases,” said Dr. Jobst. “I performed procedures on eight patients across five different operating rooms, which would not have been feasible with large robotic-assisted surgery (RAS) platforms. It is truly exciting that MIRA has the potential to extend the benefits of minimally invasive surgery to more patients.”
With funding from NASA, MIRA will hitch a ride to the International Space Station (ISS) in 2024 to conduct technology demonstrations. Onboard the ISS, MIRA will occupy no more space than a microwave oven and be housed in a small experimental locker. Its experiments will include cutting simulated tissue and performing other maneuvers that mimic minimally invasive surgery.