Nanoflex Robotics Submits IPO Prospectus: Two Decades of ETH Zurich Innovation Culminate in Breakthrough Magnetic-Driven Neurovascular Intervention Platform

Mountain Labs
Venture Capital Firms

Kinled Holding
Investing in Early-Stage Companies

Ascend Capital Partners
Venture Capital and Private Equity Platform

Nanoflex Robotics
Magnetic-Controlled Medical Soft Robotics Developer
His favorite movie is "Good Will Hunting."
Will, the protagonist, possesses extraordinary mathematical talent but allows grief to lock away his gifts. To open the heart of this gifted young man, Professor Lambeau and psychology expert Sean offer Will unexpected acceptance and support.
Matt Curran, CEO of Nanoflex Robotics, remarked on his impressions of the film, stating, “Without support and application, talent is nothing.”
The film’s narrative partially overlaps with his current experiences. He now leads Nanoflex Robotics, a medical technology startup spun out of ETH Zurich. To enable timely and safe treatment of vascular diseases, including acute ischemic stroke, the company has developed a robotic system that uses magnetic fields to precisely guide specialized catheters deep into the brain.
The emergence of this robotic system owes much to research at ETH Zurich and the efforts of two generations. In February 2023, two years after its founding, Nanoflex Robotics raised $12 million in its first round of financing. At this point, it began to gradually step out from under the auspices of ETH Zurich and advance into the field of robot-assisted interventional procedures.
This round of financing was led by Ascend Capital Partners, with participation from Kinled Holding Ltd and Mountain Labs AG. Jerry Hong, CEO of Ascend Capital Partners, will join the board of directors. The company intends to use the funds to bring its first-generation system to market and accelerate the development of novel neurointerventional products.

Prototype of Nanoflex Robotics (Image source: Nanoflex Robotics official website)
This technology has been under development at ETH Zurich for nearly 20 years.
Nanoflex Robotics was spun out of the Multi-Scale Robotics Laboratory (MSRL) at ETH Zurich. The company aims to revolutionize endovascular surgical procedures, techniques, and outcomes, elevating robotic interventional procedures to the standard of care.
MSRL has achieved a series of accomplishments in research. It is a highly multidisciplinary group integrating three distinct subgroups focused on robotics and systems, materials and manufacturing, and cell biology, respectively. Early inventions in microelectromechanical systems (MEMS) from the laboratory led to the establishment of a new company. MSRL’s pioneering work on the magnetic manipulation of microrobots resulted in patent recognition for ETH, and subsequently, MSRL created bacteria-sized microrobots in experimental settings.
In addition to the research support provided by ETH and MSRL, the birth of Nanoflex technology would not have been possible without two key figures in the team—Brad Nelson and Christophe Chautems.

The Three Founders of Nanoflex Robotics (Image source: Nanoflex Robotics official website)
Brad Nelson is a Professor of Robotics and Intelligent Systems at ETH, with a research focus on microrobotics and nanorobotics.
After studying mechanical engineering at the University of Minnesota, he served as a computer vision researcher at Honeywell and worked as a software engineer at Motorola. He subsequently earned his Ph.D. in Robotics from Carnegie Mellon University. With over thirty years of experience in the field of robotics, Nelson has received numerous awards for his contributions to robotics, nanotechnology, and biomedicine, including the Hamdan International Award for Medical Artificial Intelligence, and was named one of “Scientific American 50.”
In 2009, Nelson and his research team were recognized by Guinness World Records for creating “the most advanced medical microrobots.” His research group has also received more than a dozen Best Paper Awards at various international conferences and in international journals.
Christophe Chautems, with the guidance of his mentor Brad Nelson, dedicated himself to the research and development of Nanoflex technology. After graduating with a degree in Mechanical Engineering from ETH Zurich, he participated in research projects for NASA and the European Space Agency from September 2009 to June 2011, where he deepened his expertise in autonomous planetary rover navigation. He subsequently worked in the automotive industry for 15 months before joining Aeon Scientific to develop an electromagnetic navigation system for arrhythmia ablation.
In June 2016, he joined MSRL. Leveraging his prior work experience, Chautems supported MSRL by designing robotic medical devices and focused on shaping the application prospects of magnetic navigation technology in the medical field. In 2018 and 2019, his patent applications were recognized by ETH as among the most promising inventions. In 2018, one of his papers received the Best Paper Award from the Society for Cardiac Robotic Navigation.
The plan to establish NanoFlex Robotics began implementation in 2020, and Matt Curran’s addition brought commercial expertise in medical devices to the robotics engineering team.
Curran has over 20 years of experience in the biomedical sector. After earning his MBA from the University of Edinburgh in the UK, he joined Medtronic, where he rose through the ranks from regional manager to eventually become Vice President of Skull and Spine Technologies within Medtronic’s Neuroscience division. During his latter 15 years at Medtronic, he was deeply immersed in the science and technology domain. Now, he has joined this startup as Chief Executive Officer, tasked with driving the commercialization of NanoFlex technology.
In 2021, Nanoflex Robotics was founded in Zurich, Switzerland, by Bradley Nelson, Christophe Chautems, and Matt Curran.
Curran admitted in an interview that it took much longer than he had anticipated to establish a spin-off company.
Initially, the project received support from ETH Zurich and Wyss Zurich. The latter is a joint technology incubator established by ETH Zurich and the University of Zurich, dedicated to emerging fields such as regenerative medicine, robotics, and bionic technologies.
In May 2021, Nanoflex Robotics was selected for an incubation program and secured CHF 7.2 million in financing. In June 2021, Nanoflex Robotics was named “Entrepreneur of the Year 2021” by Venturelab.
According to the World Stroke Organization, nearly 14 million people worldwide suffer a stroke each year, with 5.5 million deaths attributed to it. Stroke is the second leading cause of death and the third leading cause of disability globally. Intracerebral hemorrhage is one of the most common and fatal forms of stroke, affecting more than 2 million patients worldwide annually.
Treatment of intracerebral hemorrhage includes medical management and surgical intervention. The three main surgical procedures for intracerebral hemorrhage are: neuroendoscopic evacuation of intracerebral hematoma, soft-channel aspiration of intracerebral hematoma, and puncture external drainage for intraventricular hemorrhage.
All three of the aforementioned surgical procedures require the placement of a drainage catheter into the hematoma cavity. However, drain insertion carries risks such as brain injury and intracranial hemorrhage. Furthermore, drainage is a highly specialized, challenging, and delicate procedure; the longer it takes to clear the thrombus after its formation, the greater the potential damage to brain tissue.
Magnetic Navigation: Revolutionizing Traditional Surgical Procedures
Remote Magnetic Navigation is a magnetically driven minimally invasive surgical technique that utilizes external magnetic fields to wirelessly navigate devices containing magnetic materials within the body. By adjusting the magnetic field and magnetic field gradients generated outside the patient’s body, magnetic navigation produces magnetic torque and forces on navigational magnetic agents, ultimately enabling the effective removal of biofouling at the molecular and cellular scales.
Existing magnetically navigated microrobots are utilized in various in vivo clinical applications, including drug delivery, stem cell transplantation, and minimally invasive surgery.These magnetically driven micro- and nanoscale sensors offer more pronounced advantages in surgical procedures, as physicians only need to implant the corresponding devices within the patient’s body, eliminating the need for manual catheter drainage procedures.
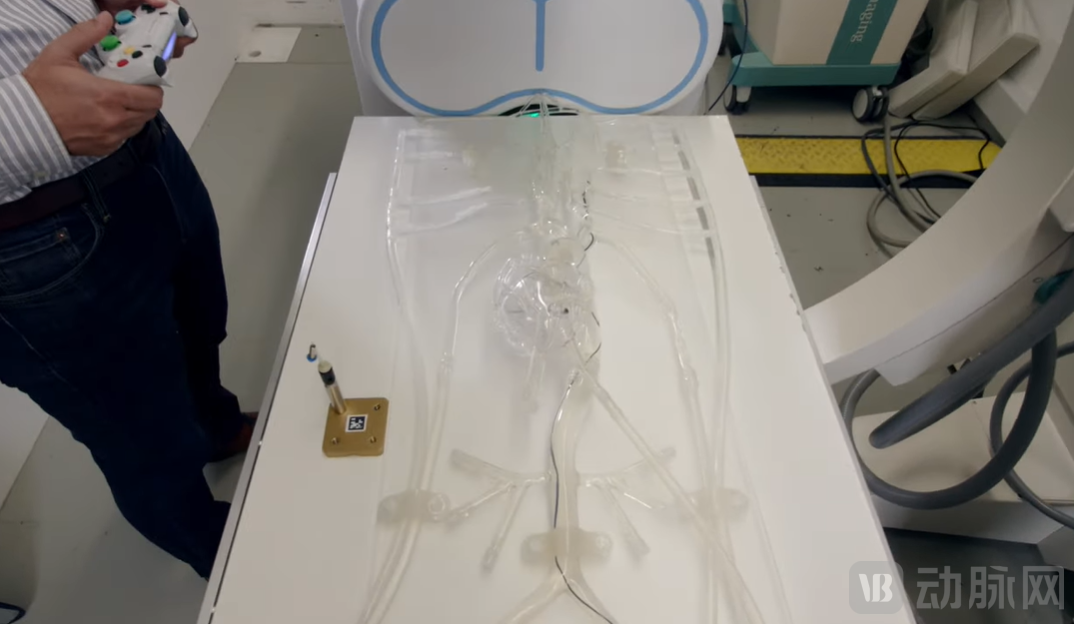
Nanoflex System Simulates Surgical Scenarios (Image source: Nanoflex Robotics official website)
Based on remote magnetic navigation technology, Nanoflex Robotics has developed a magnetic soft robotic catheter. Physicians can remotely operate the robot to treat patients, thereby simplifying and shortening procedure time and reducing the risks associated with stroke treatment.
Remote Operation: Rapid and Accurate Access to the Brain
Compared with traditional catheters, the precise guidance of magnetic catheters will accelerate and simplify the procedural workflow.
In the official video, the Nanoflex system consists of a magnetic field generator and a magnetic catheter, with the catheter tip composed of a magnetic device. During the procedure, physicians can remotely control the catheter tip to navigate into human blood vessels for drainage interventions using a remote controller.
ETH engineer Chautems spent over five years in Nelson’s research group developing magnetic catheters and investigating methods to reduce the system’s size. Owing to the presence of a magnetic tip, the catheter distal end can bend in any direction; furthermore, proprietary miniaturization technologies have made the tip smaller and more flexible.
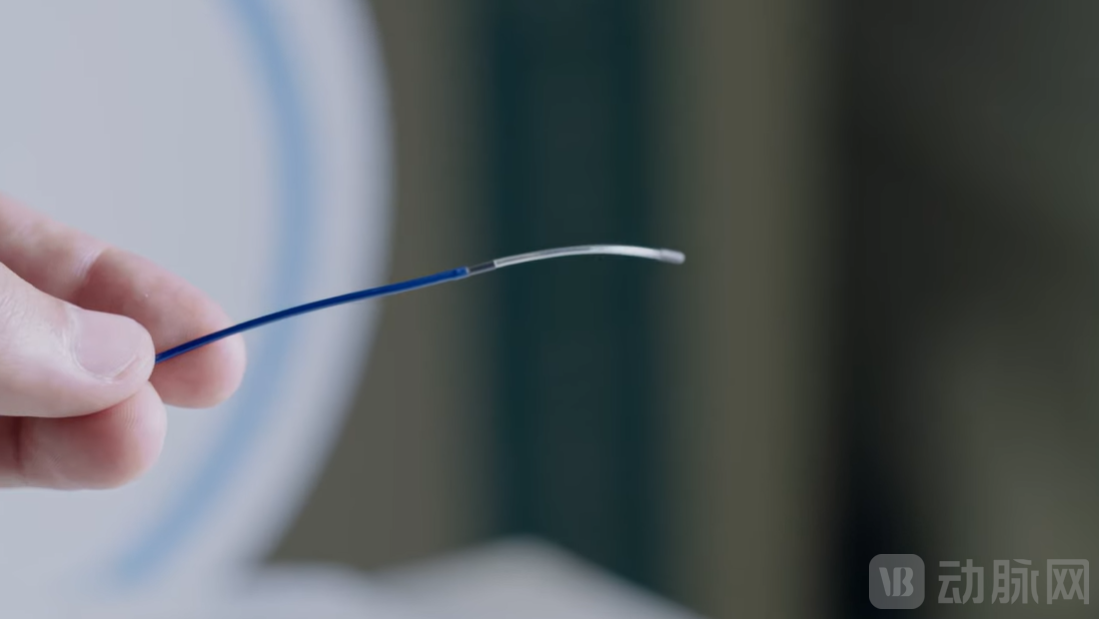
Magnetic Catheter Tip of the Nanoflex System (Image source: Nanoflex Robotics official website)
With the Nanoflex system, doctors are expected to perform procedures remotely using a controller and a screen.Due to the current shortage of catheterization specialists in hospitals, Chautems and his team hope that their system will enable more patients to receive timely stroke treatment. He believes that a softer, more maneuverable catheter can reduce the risk of vascular injury, allowing even less experienced surgeons to treat stroke using the Nanoflex system.
Furthermore, in traditional drainage procedures, physicians rely on X-ray imaging to assess the patient’s internal condition. The remote-controlled manipulation of magnetic catheters also means that physicians are exempt from radiation exposure during the procedure.
Wide-Application Magnetic Field Generator
During the surgical procedure, the patient lies next to a magnetic field generator that produces a directional magnetic field. The system and its associated software were developed under the leadership of ETH Professor Bradley Nelson. The magnetic field generator creates a magnetic field that enables physicians to navigate magnetic catheters through the complex network of blood vessels in the human body.
“Our goal is to generate a magnetic field within the smallest possible space to reduce the device’s size and weight. We ultimately developed a new, now-patented cooling system to address this challenge. The more compact and flexible magnetic navigation system will be significantly less expensive than competitors’ products.”
Compared with commercially available equipment permanently installed in operating rooms, Nanoflex’s magnetic field generator is lighter. It can be moved into and out of the operating room as needed, requiring only electricity and water throughout its operation, thereby enabling a broader range of applications.
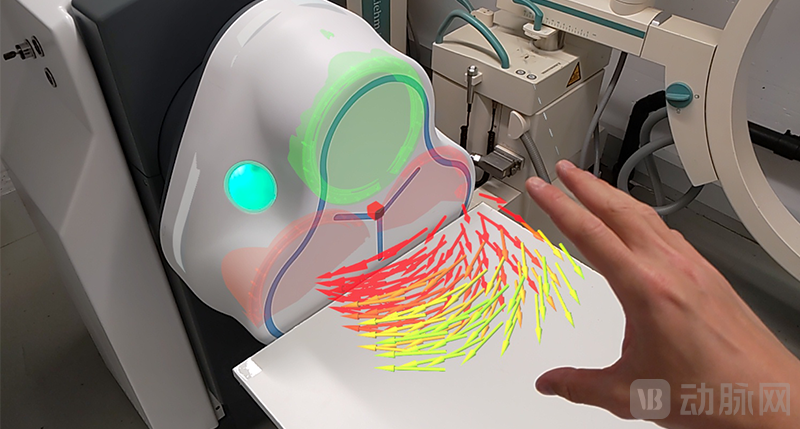
Magnetic Field Generator of the Nanoflex System (Image Source: Nanoflex Robotics Official Website)
The Nanoflex robotic platform has currently only completed experiments on plastic models.
In 2023, Nanoflex Robotics plans to conduct its first-in-human trials and submit an application to the FDA. The $12 million raised in Series A financing will also be used to advance the first-in-human trials and regulatory approval of the Nanoflex robotic platform.
Other similar products targeting stroke treatment remain in the experimental stage, and whether their scientific and technological achievements can be successfully translated into clinical applications remains uncertain.
Hugh Lee, an Associate Professor of Biomedical Engineering at Purdue University in the United States, has invented a magnetically controlled microrobot capable of automatically clearing catheters to treat stroke caused by intracerebral hemorrhage.
Timothy Bentley, a veterinary neurosurgeon at Purdue University, collaborated with Albert Lee of the Goodman Campbell Brain and Spine Institute in Carmel, Indiana, to test this innovation in a porcine hemorrhage model. In the animal treatment study, the micro-robots successfully removed clots in six out of seven animals, demonstrating an efficacy rate of 86%.
Hugh Lee believes that stroke is difficult to treat, and this innovation represents a genuine advance in stroke therapy. Currently, the Office of Technology Commercialization at the Purdue Research Foundation has assisted Hugh Lee in filing intellectual property patents for this project. Hugh Lee plans to next pursue FDA approval to initiate first-in-human trials.
Yoonho Kim, a mechanical engineer at the Massachusetts Institute of Technology (MIT) in the United States, led researchers in presenting a proof-of-concept for a miniature, soft, and highly flexible robot capable of navigating the tortuous and narrow capillaries within the human brain.
This magnetic navigation robotic system from the Massachusetts Institute of Technology (MIT) in the United States has currently only been tested in computer models and tissue samples.
For Nanoflex Robotics, both dream-building and fundraising are merely a beginning.