Great Robotics Emerges as a Breakthrough Contender with World’s First Full-Procedure Remote-Controlled Orthopedic Endoscopic Surgical Robot

Great Robotics
Surgical Robot Developer
The Surgical Robotics Industry Achieves a Milestone Breakthrough.
In late May, several leading Chinese experts in minimally invasive orthopedics collaborated with Guirui Technology’s independently developed “Newton” master-slave orthopedic endoscopic surgical robot system to successfully perform the world’s first 5G-enabled remote orthopedic endoscopic robotic research surgery. Building upon the research surgeries conducted in March, this achievement introduced multiple new surgical techniques, marking a milestone breakthrough for the industry.
The breakthrough of this surgery lies in the fact that performing minimally invasive orthopedic procedures via a teleoperated robotic system imposes exceptionally high requirements on intelligent surgical planning, safe robotic manipulation, real-time haptic feedback, precise algorithm design, master-slave operational accuracy, and data signal transmission. This marks the first time in history that a fully remote, minimally invasive orthopedic surgery has been completed, encompassing all core surgical steps.

“Newton” Master-Slave Orthopedic Endoscopic Full-Procedure Robotic System
Previous attempts at 5G-enabled remote orthopedic surgery were constrained by technological limitations, focusing primarily on remote consultations, surgical planning, or navigational positioning. In contrast, “Newton” has successfully executed all core procedural steps of the target surgery under commercial 5G conditions. These accomplishments include image acquisition and processing, remote surgical planning, remote automated guidance, establishment of the surgical access channel, and remote master-slave control of the multi-axis composite movements of surgical instruments such as robotic arms, working cannulas, endoscopes, forceps, and electrocoagulation devices.
Led by Professor Zhou Yue, Professors Chen Bolai (left) and Jiang Yi (right) successfully performed the first 5G remote-controlled surgery.
Intraoperative signals and data transmission were seamless, with stable interaction. Following intelligent remote planning, the slave robotic arm, located hundreds of kilometers away, accurately replicated a series of procedures guided by the master console, including guidance and positioning, puncture and dilation, working channel adjustment, nucleus pulposus extraction, and radiofrequency coagulation. This breakthrough overcame physical spatial limitations and successfully achieved the intended surgical outcomes.
In the orthopedics industry, the breakthrough of Newton Robot lies in: ““Newton” is the world’s first master-slave orthopedic endoscopic minimally invasive surgical robot.The platform enables spinal surgery robots to evolve from localized intraoperative navigation and positioning to providing full-process assistance across all critical surgical steps, thereby assisting surgeons in completing all core procedural steps of minimally invasive orthopedic surgeries (including remote surgical operations).
In the surgical robotics industry, the “Newton” surgical robot integrates the master-slave design of laparoscopic surgical robots into an automated robotic guidance system. It adopts a system architecture featuring multiple robotic arms and interchangeable modular surgical instruments (such as forceps, electrocautery devices, and burrs), combined with a proprietary high-performance imaging system and high-precision real-time tracking algorithms, to develop an intelligent endoscopic total joint replacement surgical robot for orthopedics equipped with a haptic feedback mechanism.
The penetration rate of minimally invasive orthopedic surgeries in China has remained consistently low. What kind of transformation can orthopedic surgical robots, which cover the entire procedural workflow, bring to the industry? To address this question, VCBeat interviewed Geerui Technology to delve deeper into the answers. During the interview,We have found that Ge Rui Technology is not merely a “surgical robotics company,” but is moving towardA Fleet Setting Sail in the Field of “Full-Process Intelligent Diagnosis and Treatment Platform”
Orthopedic surgical robots have long been a hot investment trend, with financing in this sector reaching billions.
Orthopedic surgical robots are not a passing fad; the underlying logic behind their surge lies in their potential to drive the development of minimally invasive orthopedic procedures in China. Unlike general surgery, urology, gynecology, and thoracic surgery, which have long entered the era of robot-assisted minimally invasive surgery, both the penetration rates of minimally invasive orthopedic surgery and robot-assisted minimally invasive orthopedic surgery remain low.
Minimally invasive surgical procedures are currently widely used in five surgical specialties: general surgery, obstetrics and gynecology, urology, thoracic surgery, and orthopedics. However, approximately 90% of minimally invasive surgeries in China fall within the first four specialties.
Taking minimally invasive spine surgery as an example, the volume of spinal surgeries in China reached 918,000 cases in 2021. Nationally, the penetration rate of minimally invasive procedures remained below 20%, representing a significant gap compared to the approximately 50%–60% penetration rates observed in European and American countries.
Moreover, the currently prevalent minimally invasive spinal surgery techniques and equipment are primarily sourced from developed countries such as Germany, the United States, and South Korea. There is a scarcity of original technologies and devices originating from China, creating an urgent need to break the industry monopoly.
In China, the number of patients with spinal disorders exceeds 400 million, with 10%–15% requiring surgical intervention. Due to a particular cultural aversion among Chinese people to the invasiveness of open surgery—epitomized by the saying “it takes one hundred days to recover from injuries to tendons and bones”—a growing number of patients are eager for the advancement and widespread adoption of minimally invasive surgical techniques.
In addition to low penetration rates, another major characteristic of the domestic minimally invasive spine market is uneven development.. In some leading domestic centers for minimally invasive orthopedic surgery, the proportion of minimally invasive procedures reaches as high as 80%, demonstrating strong patient acceptance; however, in most other hospitals, the penetration rate of such procedures remains below 15%.
Three Major Obstacles to the Promotion of Minimally Invasive Orthopedic Surgery: The Steep Learning Curve for Surgeons, Excessive Concentration of High-Quality Medical Resources, and Significant Radiation Exposure
The new generation of minimally invasive orthopedic surgical robots can effectively address the three major pain points hindering the widespread adoption of minimally invasive spinal surgery. Spinal surgery is characterized by complex anatomy, deep operative fields, significant trauma, and high risks. The intelligent planning, surgical guidance, precise positioning, and accurate manipulation offered by surgical robots can reduce procedural difficulty, shorten operation time, and minimize radiation exposure. For patients, minimally invasive spinal surgery significantly reduces blood loss, shortens recovery periods, and lowers the risk of complications. Furthermore, through more efficient procedures, low-cost modular consumables, and less invasive techniques, it substantially reduces the overall diagnostic and treatment costs for the healthcare system.
Meanwhile, master-slave surgical robots equipped with force feedback and comprehensive haptic capabilities can significantly reduce the learning curve for surgeons. When combined with the latest remote-controlled surgical technologies, they can facilitate the widespread and equitable distribution of medical resources.
Taking lumbar disc herniation surgery as an example, open procedures involve larger incisions and excessive stripping of the paraspinal muscles, which may lead to persistent postoperative low back pain. Consequently, open surgeries are being performed less frequently, while minimally invasive techniques are increasingly adopted. Currently, the least invasive procedure for disc herniation is endoscopic discectomy via the intervertebral foramen (transforaminal endoscopic discectomy). This technique demands high precision in needle puncture and cannula placement; any inadvertent error carries a risk of nerve injury. Robot-assisted transforaminal endoscopic discectomy ensures more precise and safer puncture and cannulation.
In orthopedics, where the penetration rate of minimally invasive surgery remains insufficient,Surgical robots will lead the wave of minimally invasive and digital-intelligent technologies in orthopedics. The next generation of orthopedic surgical robots will also evolve toward intelligence, remote operation, master-slave control, and full-process assistance.
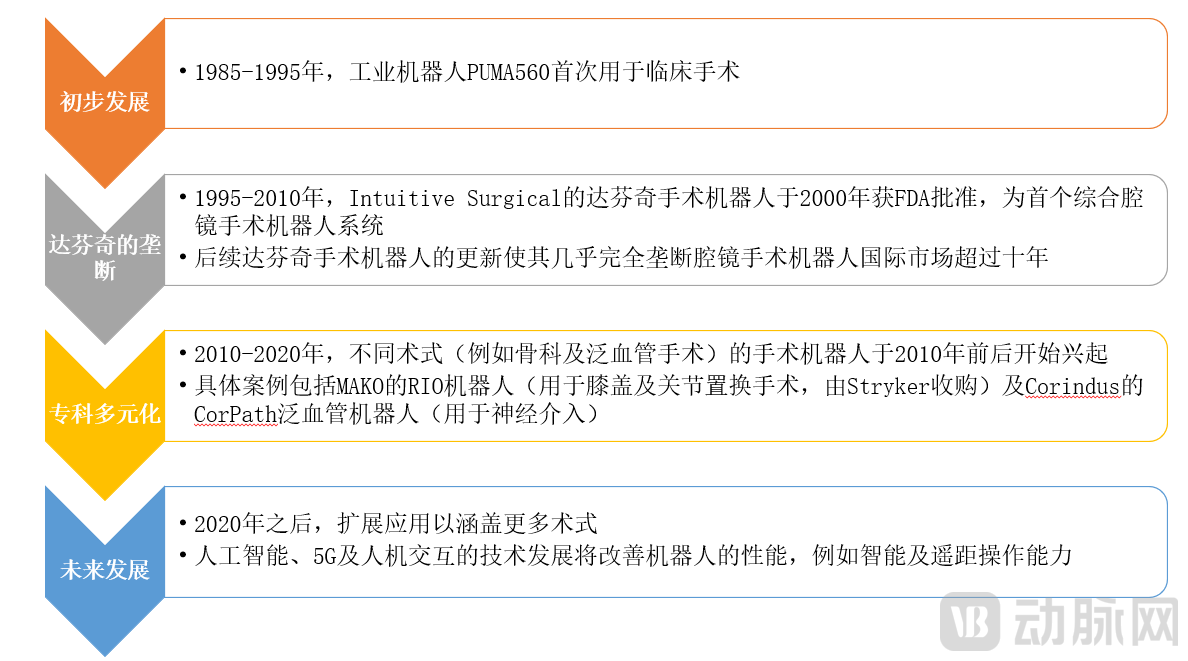
The Development History of Surgical Robots
Amid the overarching trend toward minimally invasive and digital-intelligent orthopedic surgeries, traditional giants in the orthopedic implant industry are intensively deploying in this sector.
Stryker acquired Mako Surgical in 2013, Zimmer Biomet acquired MEDTECH in 2016, Medtronic acquired Mazor Robotics in 2018, and Smith & Nephew acquired BlueBelt in 2016.
Through acquisitions, industry giants are continuously launching surgical robot products in the fields of joint, spine, and trauma.However, giants with first-mover advantage have not completely dominated the market, as orthopedic surgical robots are still undergoing continuous innovation and iteration.Previous generations of surgical robots often featured limited functionality and narrow applications, mostly confined to navigation for spinal pedicle screw placement or needle insertion assistance, or aiding one or two steps in joint replacement surgeries. Typically, after the robot provided guidance on a planned surgical trajectory or assisted with needle placement, the remaining 90% of the primary surgical procedures were still performed manually.

Typical Operating Scenarios for Orthopedic Navigation Surgical Robots (Robot-Assisted Localization with Primary Manual Operation)
(Image source: https://spinalnewsinternational.com/wp-content/uploads/sites/11/2018/11/Mazor-X-Medtronic-copy.jpg)
The ideal next-generation orthopedic surgical robot should be capable of assisting with all core procedural steps based on surgical objectives, rather than only a subset. Consequently, the development of “full-procedure” minimally invasive orthopedic surgical robots that assist with the entire workflow of core operative maneuvers has become key to breaking through the industry’s development bottlenecks.
As the industry races to explore next-generation surgical robots, Great Robotics has achieved a breakthrough by developing the “Newton” master-slave endoscopic robotic system for orthopedic surgery. This product transcends the limitations of previous traumatic spine robots, which were restricted to navigation and screw/needle placement, by providing full-process assistance for minimally invasive spinal surgeries. Its applications are also poised to expand into minimally invasive neurosurgery and joint procedures in the future.

"Master-slave control, full-process intelligent assistance, and remote operation are key breakthroughs of 'Newton'."
The “Newton” robotic system can perform key minimally invasive spinal surgical steps, including intelligent preoperative and intraoperative planning and adjustment, automated robotic arm guidance and positioning, rapid establishment of working channels, puncture and dilation, adjustment of the surgical channel’s orientation, nucleus pulposus removal, and radiofrequency coagulation, thereby enabling subsequent endoscopic fusion procedures. The surgical approach may utilize multiple minimally invasive channels or, as needed, a single minimally invasive channel. With more precise positioning and quantified, stepwise manipulation, the “Newton” system reduces iatrogenic injury to patients.
This product enables orthopedic surgeons to rapidly establish precise surgical access, after which they can perform minimally invasive surgeries by fully operating the robotic system, akin to how urologists operate the da Vinci Surgical System. This significantly reduces the learning curve for minimally invasive orthopedic procedures, facilitating broader adoption and driving a substantial increase in the penetration rate of such surgeries. It is poised to become a new paradigm for precision diagnosis and treatment in minimally invasive orthopedics, allowing more patients to benefit from high-quality care.
Looking beyond orthopedic surgical robots to the broader surgical robotics industry, “Newton” also boasts numerous noteworthy innovations.
Currently, in the global surgical robotics industry, laparoscopic and orthopedic surgical robots are the two most widely applied subsectors. The well-known “da Vinci” system is a laparoscopic surgical robot, primarily used for soft-tissue surgeries. “Newton” is an endoscopic orthopedic surgical robot. Minimally invasive orthopedic surgery must address not only hard-tissue issues but also soft-tissue considerations; performing procedures within tissues comprising both hard and soft components and within a space of only a few millimeters poses greater technical challenges.
Orthopedic endoscopic surgical robots demand higher precision. Laparoscopic surgical robots operate in a relatively larger workspace, typically at the centimeter scale or even larger, but require high coordination accuracy among surgical instruments. In contrast, orthopedic endoscopic surgical robots function in a much narrower space, primarily at the millimeter scale, with dense surrounding neural tissues; therefore, they impose stringent requirements on image guidance, as well as the operational precision of robotic arms and surgical instruments. Both product categories present extremely high barriers to entry.
The “Newton” robotic system integrates the master-slave control concept of laparoscopic surgical robots, enabling flexible manipulation by surgeons, enhancing procedural safety, and reducing the learning curve. Additionally, “Newton” features intelligent surgical guidance capabilities that assist surgeons in rapidly establishing surgical access, thereby improving operational efficiency and precision. The system also provides haptic force feedback and a panoramic view of the surgical field, offering surgeons more direct and comprehensive tactile perception.
The three core features—remote force-feedback master-slave precision manipulation, intelligent surgical guidance, and full-scenario perception—represent unique innovations and positioning that distinguish the “Newton” surgical robot from other surgical robots, enabling it to truly perform precise minimally invasive surgeries.
In the surgical robotics industry, late entrants often hold a greater innovation advantage, as the needs of doctors and patients typically become clearer and more defined only after the first-generation products have been introduced. The da Vinci Surgical System, the most commercially successful robot globally, was not the first generation of laparoscopic robots; rather, it entered the market more than a decade after the commercialization of the first-generation laparoscopic robots. Of course, as a late entrant in the industry, it faces higher expectations from all stakeholders.
As a latecomer in the field of orthopedic surgical robots, how has Ge Rui Technology managed to achieve rapid advancement and catch up with industry leaders?
The “Newton” robot has achieved high-quality innovation, thanks on one hand to the Guorui team’s robust technical reserves and on the other to Guorui Technology’s commitment to medical-engineering integrated innovation.
Gao Shang, founder of GeRui Technology, stated:“High-quality innovation means that innovations should meet market expectations and clinical needs. We have consistently adhered to the deep integration of medicine and engineering, involving senior clinical experts throughout the entire product development process to achieve truly high-quality innovation. The team at Geirui Technology has accumulated nearly 20 years of experience in orthopedics and interventional procedures, cross-integrating innovative technologies from both fields. Throughout the R&D process, we maintain close collaboration with clinical experts, leveraging our strong capabilities in technological industrialization and commercialization to address the genuine pain points in clinical practice and the healthcare system.”
Currently, Gory Technology has established collaborative partnerships with more than ten renowned Grade III Class A hospitals in China, engaging in in-depth cooperation across multiple domains including clinical practice, scientific research, and product development. By optimizing its products based on the most recent and urgent clinical needs, the company provides optimal solutions for healthcare systems.
Throughout a series of remote research surgeries, the Newton Robot has also garnered high acclaim from numerous top-tier experts in the industry.
In this research-oriented surgical procedure, Professor Zhou Yue from Xinqiao Hospital of the Third Military Medical University led the guidance for the 5G remote endoscopic robotic orthopedic surgery and successfully performed the world’s first robot-assisted lumbar discectomy via a psoas major approach, featuring master-slave control combined with automatic navigation.
Professor Zhou Yue highly praised the innovativeness of “Newton,” remarking that it represents a significant advancement in indigenous technological innovation and will drive the development of intelligent surgical robotics in China. He expressed his hope that GeRui’s “Newton” fully automated endoscopic orthopedic surgical robot would successfully enter human clinical trials in the future, while gradually expanding into more technological innovations and clinical application scenarios.
Professor Shen Hongxing of Renji Hospital, Shanghai Jiao Tong University School of Medicine, performed the world’s first robot-assisted vertebroplasty combining master-slave control with automatic navigation, and experienced and guided the full procedural workflow of endoscopic minimally invasive robotic surgery.
Professor Shen Hongxing stated that patients should be the primary beneficiaries of technological advancements. The “Newton” robotic system has significantly reduced iatrogenic injuries in patients through more precise positioning and quantified, stepwise operational control, marking a substantial clinical advance. Professor Shen also emphasized that minimally invasive surgery and surgical robotics are mutually reinforcing. He expressed his hope that the “Newton” system will continue to strengthen medical-engineering collaboration, leverage deep learning, and undergo continuous optimization, thereby delivering greater benefits to the general public.
Professor Chen Bolai from Guangdong Provincial Hospital of Traditional Chinese Medicine completed the world’s first remote 5G master-slave controlled and automatically guided minimally invasive robotic transforaminal right L3/4 lumbar discectomy between Beijing and Shandong.
Following the 5G remote surgery, Professor Chen Bolai commented, “The ‘Newton’ system deeply integrates digital technologies. Its real-time navigational imaging assists physicians in performing puncture and catheterization, precisely determining the angle and depth of instrument insertion, thereby achieving greater accuracy than traditional manual techniques. Furthermore, the 5G signal remained highly stable throughout the procedure, with negligible latency, ensuring coherent and smooth operation.”
Professor Jiang Yi of the Haidian Campus of Peking University Third Hospital completed the world’s first remote 5G master-slave controlled and automatically guided minimally invasive robotic interlaminar posterior approach L4/5 lumbar discectomy between Beijing and Shandong.
Professor Jiang Yi expressed great surprise at the force feedback functionality of “Newton.” “For many robotic systems, developing force feedback remains a challenge, particularly for remote force feedback, which requires substantial computational power to achieve. In this remote surgery, force feedback for critical structures was triggered multiple times, representing a significant advancement.”
Furthermore, under the guidance of Professor Zhou Yue and Professor Shen Hongxing, Raymond, a senior clinical expert at Acuity, conducted preliminary testing of multiple minimally invasive procedures using a dual-access approach.

Professor Zhou Yue Operates the "Newton" Robot and Provides Guidance Through Discussion

Professor Shen Hongxing’s Hands-On Use of the “Newton” Robot and Exchange of Guidance
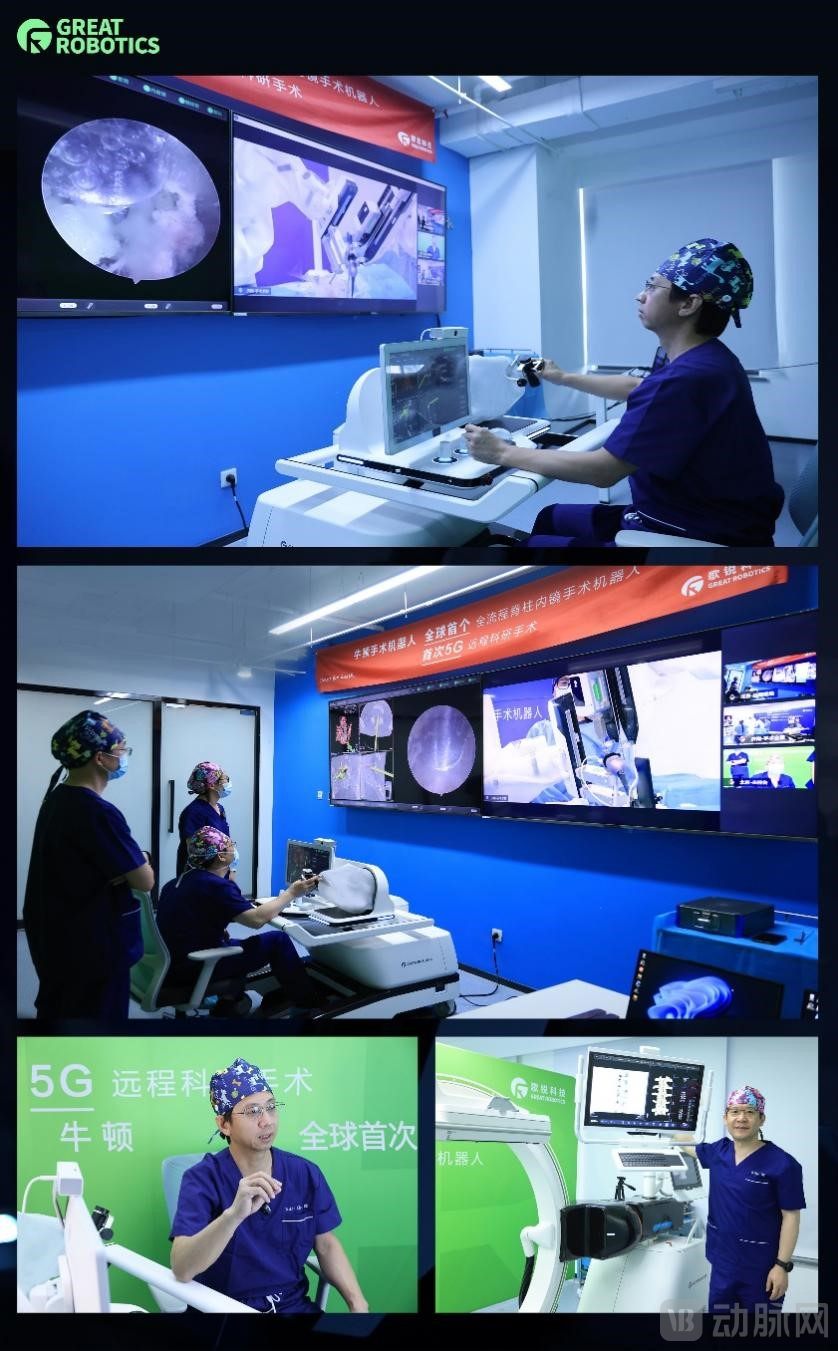
Professors Chen Bolai (bottom left) and Jiang Yi (bottom right) successfully performed the first 5G remote-controlled surgery
Previously, in March 2023, Professor Xin Tao, a neurosurgery expert at Shandong Provincial Qianfoshan Hospital, and Professor Liu Xinyu, a spine surgery expert at Qilu Hospital of Shandong University, jointly conducted the inaugural testing and validation of the feasibility and efficacy of the “Newton” system for performing minimally invasive spinal surgeries.
Professor Xin Tao stated that “Newton” has enabled spinal surgery robots to evolve from mere navigation and positioning to full-process assistance, significantly advancing the development of minimally invasive spinal surgery. Meanwhile, the integration of high-precision intraoperative imaging systems with robotic platforms has achieved superior synergistic outcomes.
Professor Liu Xinyu stated that most robots currently available on the market are screw-placement navigation systems. “Newton” is the first master-slave, full-process assistive robot for orthopedics, which highly replicates the clinical workflow of endoscopic spine surgery, thereby reducing surgeons’ operational fatigue and ensuring surgical quality.
Multiple experts have expressed strong approval of the design philosophy, user experience, and innovative features of “Newton.”
During the process of product development and research-oriented surgical procedures, Gerui Technology has received extensive and in-depth guidance on medical-engineering collaboration from numerous experts and professors, including Professor Ye Xiaojian from Tongren Hospital, Shanghai Jiao Tong University School of Medicine; Professor Ma Xuexiao from the Affiliated Hospital of Qingdao University; and Professor Li Yongjin from Guangdong Provincial Hospital of Chinese Medicine.

Dual-channel testing and the first research surgery in March (Center: Professor Xin Tao / Bottom: Professor Xinyu Liu)
In just over two years since its founding, Gory Technology has developed a comprehensive six-in-one platform solution comprising “precision intraoperative imaging robots + precision navigation robots + intelligent software + master-slave force-controlled multi-arm surgical robots + proprietary modular instruments and consumables + remote surgery metaverse,” all of which are independently researched and innovated by Gory Technology.
Why Has Geerui Technology Achieved Rapid Growth in Two Years?
From a team perspective, the cornerstone of rapid development is that Gery Technology possesses a team with extensive industry experience and expertise in integrating medicine and engineering.
Gao Shang, founder of GeRui Technology, graduated from Tsinghua University and possesses an interdisciplinary background in mechatronics, robotic design, 3D printing, and materials science. As a senior international expert in the fields of integrated digital diagnostics and therapeutics and medical robotics, he served as the project leader for China’s National Major Science and Technology Project on “Digital Diagnosis and Treatment” during the 13th Five-Year Plan period. He has previously held executive positions, including Vice President, at major domestic and international medical corporations, accumulating nearly two decades of experience in product development and global commercialization.
The founding team boasts over a decade of collaborative experience in the high-end medical sector, integrating foreign enterprises, domestic companies, and national key research projects. Together, they have navigated the complete lifecycle from original technology development (0 to 1) and scaling (1 to 100), covering innovative product definition, project initiation, R&D, testing, regulatory submission, manufacturing, marketing and sales, as well as iterative upgrades.

Gao Shang, Founder of GeRui Technology
Among the core members of the founding team are industry veterans with over a decade of experience at leading global medical device companies such as “GPS” (GE Healthcare, Philips, and Siemens Healthineers), Medtronic, and Zimmer Biomet, as well as orthopedic specialists with nearly 20 years of hands-on clinical practice in top-tier tertiary hospitals. These experts either possess profound technical expertise spanning precision imaging, robotics, surgical instruments, and artificial intelligence, or have an in-depth and comprehensive understanding of clinical needs. The complete organizational structure established from inception has enabled the team to keenly identify clinical pain points and accurately and efficiently translate medical requirements into engineering specifications, thereby accelerating product commercialization.
Tactically, the Geerui team tends to adopt a “begin with the end in mind” approach, driving innovation through goal-oriented strategies.
Although “Newton” has not yet officially entered the market, the team at Guorei Technology has already conducted in-depth strategic planning and laid out a comprehensive roadmap for the future commercialization of its next-generation orthopedic endoscopic surgical robot.
Barriers in the medical device industry lie not only in the high threshold for front-end R&D, but also in commercialization, which often proves to be a formidable hurdle.
As an emerging innovation, orthopedic surgical robots face heightened challenges in achieving commercialization from scratch. In the context of healthcare insurance cost containment, the domestic market also imposes certain entry barriers to the commercialization of orthopedic surgical robots. In March 2022, the National Healthcare Security Administration issued the “Guidelines on Improving Pricing and Related Policies for Auxiliary Procedures Such as Orthopedic ‘Surgical Robots’ and ‘3D Printing’ (Draft for Comment).” The document delineated four distinct tiers of bundled pricing for orthopedic robotic surgeries.
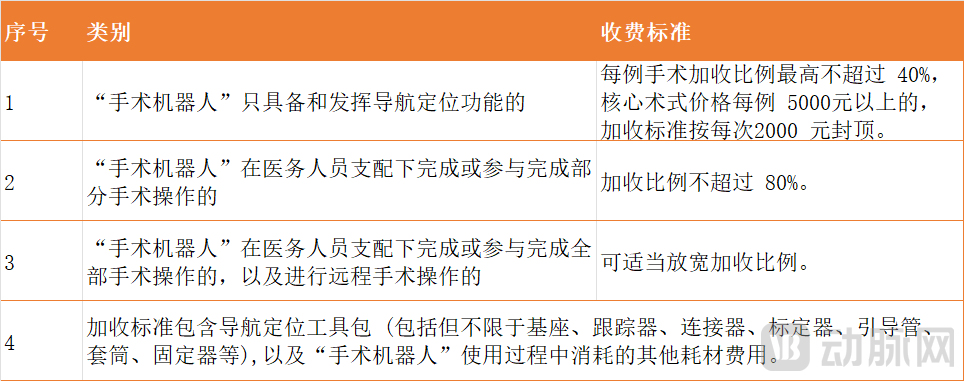
Draft for Comments: Classification of Surgical Robot Charges
Subsequently, the Hunan Provincial Healthcare Security Administration’s “Notice on Regulating the Use and Charging Practices of Surgical Robot-Assisted Operating Systems” (Xiang Yibao Fa [2022] No. 46) further clarified the payment standards, with Article 3 specifying the surcharge rates:“Where a surgical robot-assisted operating system, under the control of medical personnel, performs or participates in performing all core procedural steps required to achieve the surgical objectives (including remote surgical operations), a 300% surcharge shall be applied.” This provision represents the highest reimbursement standard under the medical insurance payment scheme, underscoring that this is the true definition and value of “full-process” or “full-surgery” coverage.
Regarding commercialization, Gao Shang stated, “Drawing on the development trajectories of successful enterprises, the ‘equipment plus consumables’ model often generates sustained revenue streams, and this approach is widely adopted in the field of orthopedic robotics. Surgical robots developed or acquired by traditional orthopedic implant companies are frequently designed as closed systems, compatible only with specific orthopedic implants or instruments. However, if unnecessary consumables are added solely to pursue the consumables-driven model, patients will ultimately be unwilling to pay for such costly products.”
“Therefore, a successful commercialization of orthopedic surgical robots should meet the following four criteria: First, it must address genuine clinical pain points. Second, it must demonstrate sufficient depth in resolving these pain points, providing critical support where it is most needed. Third, it must incorporate proprietary, essential consumables that enable a sustainable internal revenue cycle. Finally, the product must deliver value enhancement to the broader medical ecosystem and healthcare system.”
The volume of spinal surgeries in China is rising rapidly, reaching 918,000 cases in 2021 and projected to reach 1.783 million by 2026 and 3.577 million by 2032. Driven by the substantial unmet demand from hundreds of millions of patients and benchmarking against penetration rates in Europe and the United States, the adoption rate of minimally invasive spine surgery (MISS) is expected to reach 50%–60%. Consequently, the commercial market potential for robotic-assisted minimally invasive spine surgery systems is highly promising.
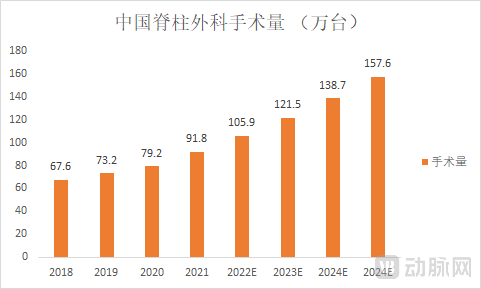
Data source:Frost & Sullivan
Established just two years ago, Geerui Technology already possesses the capability to define next-generation products in the field of orthopedic surgical robots, and is frequently regarded by external observers as a surgical robotics company.
However, Geerui Technology is not merely a surgical robotics company.From a product perspective, Geerui Technology’s pipeline covers orthopedic surgical robots, interventional surgical robots, intraoperative high-end imaging systems, dedicated consumables, and software.
It is difficult to fully capture the business scope of Geerui Technology by merely categorizing it as an orthopedic medical device company or a surgical robotics company.
Geerui Technology's vision is to create next-generation intelligent diagnostic and therapeutic equipment solutions that are digital, intelligent, and robotic.
Gao Shang stated that Ge Rui Technology’s true vision is to develop a new generation of digital, intelligent, and robotic smart diagnostic and therapeutic equipment systems, along with supporting innovative consumables, centered around operating rooms and major clinical scenarios. This initiative aims to enhance efficiency and reduce costs across the entire healthcare system, ultimately driving a transformation in diagnostic and treatment methods centered on the operating room, while widely promoting minimally invasive and remote surgeries to benefit more patients.
As early as 1970, NASA began exploring telesurgery to treat astronauts in space; subsequently, the technological prototype of the “Da Vinci” surgical robot also stemmed from the need for remote battlefield surgery. After more than 30 years of rapid development, teleoperated surgical robots have gradually become a practical reality.
The development of surgical robots, particularly those for remote surgery, has revealed the time required to transform diagnostic and treatment paradigms. Over this relatively extended timeframe, the industry will inevitably experience both downturns and upswings; however, we firmly believe that a bright future for surgical robotics is just around the corner. We are confident that companies mastering core underlying technologies, addressing genuine clinical needs, focusing on improving efficiency and reducing costs within healthcare systems, and possessing the capability for industrial-scale commercialization are driving innovative breakthroughs that will undoubtedly lead the industry’s rapid development.