Great Robotics' 'Newton' Achieves Global First in Animal In Vivo Trial for Spinal Endoscopic Surgery

Great Robotics
Surgical Robot Developer
At the dawn of 2024, the surgical robotics industry has already witnessed several milestone innovations. It is evident that 2024 will be a transformative year for surgical robotics, with next-generation products poised for launch.
In the field of orthopedic surgical robots, next-generation products are gradually taking shape.
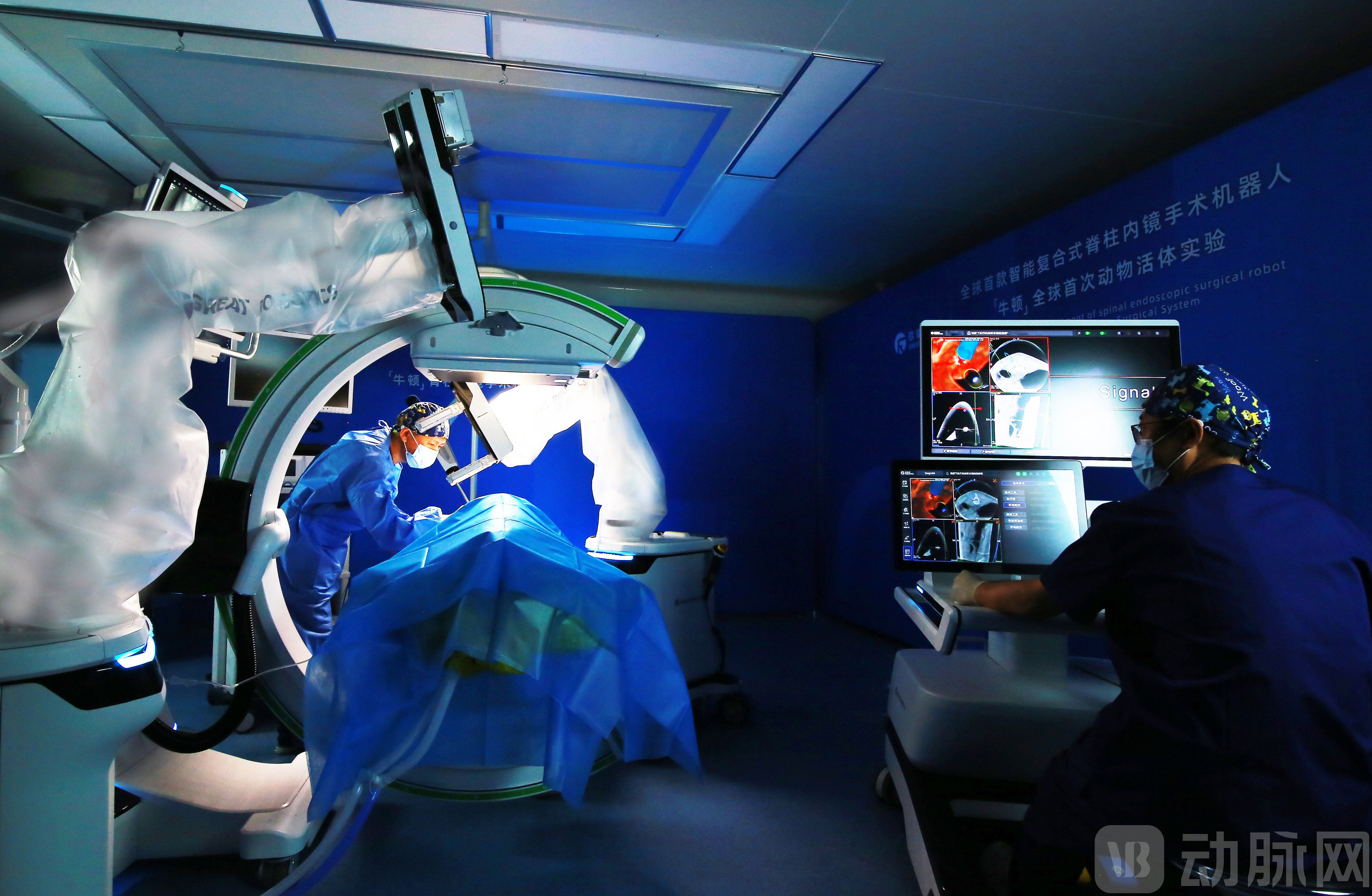
Recently, the “Newton” master-slave surgical robot system developed by GeRui Technology was used by multiple minimally invasive orthopedic experts to perform in vivo animal experiments of spinal endoscopic surgery. The procedure achieved a 100% success rate, fully demonstrating that “Newton” meets the operational requirements for full-process minimally invasive spinal surgeries across different segments and approaches.
Over the past three decades of global development, orthopedic surgical robots, particularly spinal surgical robots, have made significant strides in assisting surgeons to enhance surgical precision, safety, and stability, thereby gaining gradual recognition among clinicians. However, their auxiliary functions remain predominantly confined to navigation technology, which limits their broader adoption and expanded applications.
The “Newton” surgical robot is a new-generation intelligent, full-process minimally invasive surgical robot newly developed by Gear Technology. In live animal experiments, clinical experts successfully performed complex procedures via master-slave control of the “Newton” surgical robot using force-feedback-enabled manipulators at the console. These procedures included high-precision puncture, rapid dilation, adjustment of trocar and endoscope position and angle, high-speed burr drilling for bone shaping, radiofrequency electrode ablation/hemostasis, and soft tissue debridement and intervertebral disc removal using nucleus pulposus forceps. Through these capabilities, the surgical robot truly enabled the complete workflow of minimally invasive orthopedic clinical surgery.
It is worth noting that the 3D images used in the experiment were generated by scanning with the “Newton 3D” series high-precision imaging system, independently developed by GuiRui. Surgeons formulated surgical plans based on these images. The “Newton 3D” is also the world’s first fully electric, 8-axis, integrated intraoperative mobile imaging system. The deep integration of a fully self-developed surgical robot with intraoperative imaging can effectively enhance surgical precision and optimize operational efficiency.

“Newton” Orthopedic/Neuroendoscopic Minimally Invasive Total Surgical Robotic Solution System Platform
During this period, the performance of the entire “Newton” system platform far exceeded the expectations of all experts.
Excellent Surgical Efficiency:Traditionally, manual endoscopic spine surgery takes approximately 70 minutes, with less experienced surgeons requiring up to 90–100 minutes. In this study, the bony spinal canal of the experimental animals was significantly narrower than that of adults, substantially increasing procedural difficulty. Although the preoperative estimate for robotic-assisted surgery was around 80 minutes, the “Newton” system’s user-friendly interface, high precision, and efficiency enabled experts to complete all surgical steps smoothly and consistently without prior training, achieving an average operative time of only 50 minutes.
High Surgical Precision:The deviation between the planned skin entry points and the actual executed skin entry points is limited to the sub-millimeter level, ensuring that the surgical robot strictly adheres to the surgical plan. Its precision far exceeds that of manual operations, thereby preventing surgical errors or related complications caused by operational deviations.
Stable and Comprehensive Performance:High-definition endoscopic instruments, nucleus pulposus forceps, high-frequency electrode tools, and 70,000 RPM high-speed burrs operated with zero failures throughout the procedure, demonstrating precise performance. "Newton’s" proprietary master-slave control system filters out hand tremors for enhanced operational stability, while its force feedback function provides clinicians with authentic haptic sensation, offering significant value in reducing surgical complications and improving procedural efficiency. The master-slave console, multi-axis robotic arms, and intelligent software systems all performed exceptionally well, ensuring the entire system is safe, reliable, and user-friendly.
Low Total Radiation in Surgery: In live animal experiments, the low-dose characteristics of the “Newton 3D” series are impeccable. Each experiment requires only one low-dose 3D scan and two low-dose fluoroscopic acquisitions to achieve positioning and navigation, eliminating the need for repeated intraoperative scanning for localization. The average imaging dose during the experiments was 0.3–0.4 mSv, which is significantly lower than the industry average, representing approximately a 60% reduction compared to benchmark products in the same category, and amounting to only about 10% of the dose from conventional CT scans. After preoperative scanning, the “Newton” system requires no additional intraoperative scans, thanks to registration and real-time optical guidance.
The experimental animals were in good condition: anatomical structures were well exposed during surgery, normal activity was resumed postoperatively, no symptoms of nerve injury were observed, and the expected objectives were achieved.
Overall, the “Newton” system performed stably and smoothly throughout the entire surgical procedure, significantly improving surgical efficiency. The system demonstrated excellent controllability, precision, and safety, with its product design fully reflecting technological innovation and human-centered care.
This experiment holds significant importance for both Ge Rui and the industry.This is the world’s first in vivo animal experiment assisted by an intelligent hybrid spinal endoscopic surgical robot., but also tested the performance of "Newton" in scenarios closer to real-world clinical settings, further validating Gory Technology's robust capability to continuously break through core technologies and rapidly iterate its products.
This animal study was conducted by Professor Zhou Yue from Xinqiao Hospital of Army Medical University, Professor Liu Xinyu from Qilu Hospital of Shandong University, Professor Jiang Yi from the Haidian Campus of Peking University Third Hospital, and Raymed and Mario, senior clinical experts at GuiRui. This achievement marks another significant milestone for the “Newton” surgical robot, following a series of cadaveric research surgeries performed in the first half of 2023. The “Newton” surgical robot has been engaging in deep medical-engineering integration with top-tier spine surgery experts, represented by Professor Zhou, to continuously drive innovation and optimize iterative improvements.
Below are the operational experiences and evaluations from the experts:

Professor Zhou Yue of Xinqiao Hospital, Third Military Medical University, performed percutaneous endoscopic lumbar discectomy.
“Over the past three decades, spinal surgery has undergone three major technological revolutions. The first occurred in the 1980s with the introduction of microscopy into spinal surgery; the second took place in the late 1990s, marked by the minimally invasive spinal surgery revolution centered on endoscopic techniques; and now, the integration of minimally invasive spinal surgery with digital intelligence technologies is driving the third revolution.”Minimally invasive, digital, and intelligent approaches are also hallmarks of modern spinal surgery technology, and the spinal endoscopic robot developed by Geerui Technology will become an important direction for the future development of spinal surgery techniques.” commented Professor Zhou Yue.

Professor Liu Xinyu of Qilu Hospital of Shandong University Completed Percutaneous Endoscopic Lumbar Decompression
Professor Liu Xinyu stated, “Achieving fully robotic operation throughout the entire process of endoscopic spine surgery is no easy task. In our experiments, the registration process for ‘Newton’ was remarkably smooth, the coordinated movement of surgical tools performed exceptionally well, and the overall efficiency was extremely high.”

Professor Jiang Yi of the Haidian Campus of Peking University Third Hospital Performed Percutaneous Endoscopic Spinal Foraminoplasty
Professor Jiang Yi was greatly impressed by the multiple functional iterations of the “Newton” system. He commented, “The optimized control footswitch enables laser-based automatic detection of foot movements to prevent accidental activation; the automatic safety wall feature for bone grinding prevents excessive bone removal and protects non-target areas with high precision…”
Furthermore, with the assistance of the “Newton” system, Raymon and Mario, senior clinical experts at Goryx Technology, respectively performed percutaneous endoscopic lumbar discectomy via the posterior interlaminar approach and percutaneous endoscopic lumbar decompression. The procedures proceeded smoothly throughout, achieving the intended objectives.
As technological expertise accumulates, China’s medical technology innovation is transitioning from follow-on to original innovation. In the field of orthopedic surgical robots, Ge Rui has put the concept of original innovation into practice, adhering to its role as an innovation leader rather than a follower.
Orthopedic surgical robots have been in development for over 30 years. Current-generation products, whether designed for spinal surgery, joint orthopedics, or trauma orthopedics, primarily address tasks such as assisted positioning, assisted bone resection, and reduction maneuvers. Clinical experts and the healthcare system have long anticipated the emergence of a new generation of intelligent, minimally invasive orthopedic surgical robots capable of providing full-process surgical assistance with greater precision and sensitivity.
“‘Newton’ is a master-slave robotic control system based on 3D precision navigation, featuring a multi-dimensional structure with coordinated movement of multiple mechanical arms. It achieves automated surgical operations through human-machine interaction, going beyond mere navigation, positioning, and surgical planning. This process is more complex and challenging, but it also offers broader prospects for development.” In Professor Jiang Yi’s view, the unique positioning and powerful capabilities of “Newton” are difficult to fully describe in a single sentence. “However, it illustrates one point: someone has to pioneer what no one else has done, and GeRui has taken that initial step.”
“Newton” is the world’s first intelligent hybrid endoscopic spinal surgery robot, developed to address the needs of minimally invasive spinal and neuroendoscopic surgeries, as well as broader clinical demands. It is integrated with the “Newton 3D” series of high-precision intraoperative mobile imaging systems, forming a comprehensive minimally invasive solution. Its modular design offers exceptional adaptability, meeting the diverse requirements of different customers, facilities, and surgical procedures.


Accumulated technological advancements are driving the continuous maturation and refinement of orthopedic surgical robots, and the market for these systems is now experiencing significant growth momentum.
From the perspective of clinical demand, global aging is accelerating, the burden of spinal disorders is worsening, and there is a trend toward younger onset. The Lancet has published articles indicating that over the past 30 years, lumbar spine diseases have ranked first among conditions impairing human mobility and health, creating an urgent need for minimally invasive surgical solutions. However, in China, the penetration rate of minimally invasive spine surgery remains low and lags behind that of some developed countries, due to factors such as the steep learning curve for physicians, the excessive concentration of high-quality medical resources, and significant radiation exposure associated with these procedures. The emergence of “Newton” directly addresses these clinical pain points, disrupts traditional diagnosis and treatment models, and enables more patients to benefit more rapidly from precise, minimally invasive surgeries.
If clinical demand is the foundation of innovation, then policy support serves as the accelerator for its translation and implementation. With the implementation of centralized procurement policies for high-value orthopedic consumables, patients’ purchasing power has been released to a certain extent, providing them with greater opportunities to choose orthopedic surgical robots.
Meanwhile, innovation in the surgical robotics industry has received strong policy support.In December 2023, the National Development and Reform Commission (NDRC) released the "Guidance Catalog for Industrial Structure Adjustment (2024 Edition)," which encourages innovative development in high-end medical devices, including high-performance medical imaging equipment, AI-assisted medical devices, mobile and remote diagnosis and treatment equipment, surgical robots, and other high-end surgical devices and consumables.
In terms of market education maturity, domestic orthopedic surgeons and patients have gained considerable awareness of the safety, reliability, and distinct advantages of robotic-assisted orthopedic surgery compared to traditional procedures. Acceptance of such surgeries is rising rapidly, indicating that the market is in its growth phase.
Amid the resonance of multiple favorable factors, public data shows that the number of orthopedic surgical robots has been steadily increasing since 2023, boosting market confidence.
Gorui has also made strategic moves in commercialization and achieved corresponding results. As an intelligent medical device company, Gorui Technology launched the industry’s first6-in-1 Platform Solution: Digital Precision Intraoperative Imaging System + Intelligent Software and Algorithms + Automated Surgical Access Robot + Master-Slave Force-Controlled Surgical Execution Robot + Proprietary Consumables + Remote Surgery Metaverse, and leveraging this foundation, we have developed digital, intelligent, and robotic equipment for minimally invasive orthopedic procedures, vascular interventions, and tumor interventions. Our product portfolio aligns with the encouraged directions in the latest industrial structure catalog, promising strong development prospects.
Currently, the “Newton 3D” series of intraoperative imaging systems has obtained Class III medical device registration certificates for multiple models and is commercially available. In the future, more healthcare institutions will be equipped with this leading-performance mobile 3D imaging system.
According to Gao Shang, Founder and Chairman of Accuray Technology, the rapid commercialization of “Newton 3D” can be attributed to two key factors. On one hand, it is thanks to a lean and efficient R&D team that remains focused on its goals and pursues excellence, thereby developing products widely recognized in clinical practice. On the other hand, it benefits from the company’s marketing strategy; since its inception, Accuray has established a proactive, lean marketing team across China to pioneer market development. With an average of nearly 20 years of extensive industry experience, core sales personnel possess mature team management capabilities and the pioneering spirit characteristic of start-up teams, serving as a crucial guarantee for the product’s rapid commercialization.
Regarding the commercial prospects of the “Newton” surgical robot, Gao Shang stated, “‘Newton’ is the world’s first master-slave spinal/neuroendoscopic fully automated surgical robot with force feedback. It features original innovation and offers unmistakable clinical advantages. Furthermore, the product is equipped with proprietary modular surgical instruments and consumables, establishing a successful closed-loop business model of ‘equipment + consumables + services.’ More importantly, the overarching design philosophy and objective are to meet genuine clinical needs and achieve widespread adoption to enhance efficiency and reduce costs within the healthcare system. In the early stages, equipment revenue will dominate; however, as the installed base expands and utilization rates gradually increase, revenue from consumables and services will grow steadily, providing the company with sustainable income. This business model is bound to have enduring viability.”
In 1940, science fiction writer Isaac Asimov proposed the "Three Laws of Robotics," the first of which states: "A robot may not injure a human being or, through inaction, allow a human being to come to harm." Today, "Newton" is continuously advancing toward the goals of high precision, safety, and stability, committed to delivering optimal therapeutic outcomes for patients with minimal trauma. This also spares physicians from excessive workloads and exposure to harmful radiation while treating patients.
However, innovation has never been easy. It involves negation, overturning, and questioning, but more importantly, it drives progress. GeRui has always moved forward steadfastly, committed to its mission of transforming traditional diagnostic and treatment models.
“Those who dig a well start with a three-inch depression to reach a depth of ten thousand fathoms.” This ancient proverb may well capture the essence of GeRui’s innovative journey. It is hoped that the advent of “Newton” will break through critical bottlenecks in clinical technology and lead minimally invasive spine surgery into its next revolution.
Review: Industry Overview and Development of Orthopedic Robots — China Medical Devices
Review: Analysis of the Current Development Status of Orthopedic Surgical Robots—Chinese Journal of Bone and Joint Surgery
[Academician Forum]: The Development of Orthopedic Surgical Robots in China—Journal of Applied Mechanics
Review: Yang, H.Y., Seon, J.K. The landscape of surgical robotics in orthopedics surgery. Biomed. Eng. Lett. 13, 537–542 (2023).
Review: Suarez-Ahedo, C., Lopez-Reyes, A., Martinez-Armenta, C. et al. Revolutionizing orthopedics: a comprehensive review of robot-assisted surgery, clinical outcomes, and the future of patient care. J Robotic Surg 17, 2575–2581 (2023).