Shanghai University Professor Develops 'GPS-like' Targeting Algorithm for Magnetic Microrobots
“Precision” and “targeting” are common trends in current medical product innovation. Currently, many medical micro- or nanorobots can achieve functions such as diagnosis, targeted therapy, and intervention within the human body through targeted navigation technology, showing great promise particularly in improving the selectivity of drug delivery. However, magnetic forces struggle to provide sufficient strength within the human body to sustain such operations, which has become a bottleneck constraining the development of micro- or nanorobots.
To address this issue,Ning Li and Gilles Soulez from the University of Montreal, Canada; Sylvain Martel from McGill University, Canada; and Quan Zhang from Shanghai University have proposed an algorithm that leverages magnetic field gradients in clinical magnetic resonance imaging (MRI) for magnetic resonance navigation, effectively enhancing the targeting efficiency of magnetic microrobots (MMRs).The related research findings were published under the title “Human-scale navigation of magnetic microrobots in hepatic arteries” in《Science Robotics》Up.
 Schematic Diagram of In Vivo Navigation for Microrobots (Image Source: Science Robotics)
Schematic Diagram of In Vivo Navigation for Microrobots (Image Source: Science Robotics)
Currently, the team has conducted a feasibility study in 12 pigs. The results demonstrated that MRN (Magnetic Resonance Navigation) of MMRs is feasible when combined with gravity, thereby proving the viability of using clinical MRI to navigate MMRs for targeting specific hepatic lobes.This technology can enhance the efficiency of various externally actuated target navigation techniques, including but not limited to magnetic navigation.
I. Design by Application Scenario
Magnetic microrobots hold promising applications in the fields of precise drug delivery, non-invasive diagnosis, and cell therapy. As their performance is often influenced by external environmental factors, researchers have developed microrobots with diverse operational mechanisms to address varying needs, including biomimetic robots, surface-walking robots, scaffold-based robots, and biohybrid robots.
1Biomimetic Magnetic Microrobots
Biomimetic Magnetic Microrobots Are Currently the Most Prolific Area of Research.Researchers have designed magnetic microrobots by mimicking microbial operational mechanisms to address the challenge of locomotion in low-Reynolds-number fluids. Some researchers have emulated the prokaryotic flagellar motion of Escherichia coli, enabling helical propulsion of the microrobots; others have taken inspiration from Paramecium by covering the robot surface with cilia, facilitating movement through periodic beating motions that resemble traveling waves.
Imitating animal locomotion mechanisms also constitutes a major category of bionic robots. In 2019, a team from Harbin Institute of Technology designed a peanut-shaped magnetic robot capable of mimicking naturalAnt Colony (Vortex Mode)andHerring Predation Array (Transverse Banding Mode), respectively accomplishing controlled transportation under heavy loads and synchronized swarm cleaning over large areas. This magnetic microrobot is capable of steering in any direction, demonstrating exceptional maneuverability and stability.
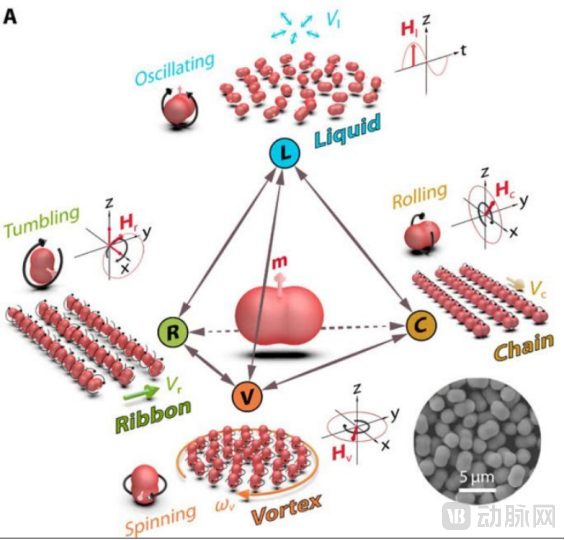 Multimodal Conversion (Image source: Science Robotics)
Multimodal Conversion (Image source: Science Robotics)
2Surface-Walking Robot
Surface-walking robots primarily navigate to target lesion sites via the circulatory system, which consists of the heart and blood vessels. These microrobots move along the vessel walls through non-reciprocating or rolling motions. Many researchers have proposed numerous designs for surface-walking magnetic microrobots in the form of nanorods, paramagnetic particles, and Janus particles.
3Stent-like Microrobots
The surface of the scaffold-based microrobot features a scaffold that mimics the porous extracellular matrix, enabling cells to be captured or cultured within the scaffold structure. This design addresses the limitations of conventional magnetic microrobots, specifically their poor loading capacity and low cell viability.
In 2020, Seong-Woon Yu and Hongsoo Choi from the DGIST-ETH Micro Robotics Research Center and the Department of Robotics Engineering at DGIST designed aBiocompatible Porous 3D Microrobots, this robot can effectively facilitate the precise targeted delivery and transplantation of stem cells.
4Biohybrid Robots
Biohybrid robots primarily address issues such as biosafety and immunogenicity. Currently, the commonly used biological carriers fall into two categories: microorganisms and human autologous cells.
Magnetic microrobots based on microbial cells; the microorganisms currently most commonly employed in scientific research include Spirulina, Chlorella, Escherichia coli, and magnetotactic bacteria. In 2022,Team of Wang Junfeng, High Magnetic Field Science Center, Hefei Institutes of Physical Science, Chinese Academy of SciencesBased on the study of the biomineralization mechanisms of magnetotactic bacteria in nature, soft ferromagnetic magnetosome-like nanomaterials with high-efficiency magnetic targeting and tumor tissue penetration capabilities were biomimetically synthesized and fabricated into magnetic microrobots. This workIt not only provides an efficient vehicle for the magnetically targeted delivery of nanomedicines, but also offers a new model system for in vitro studies on the biomineralization mechanisms of magnetotactic bacteria.
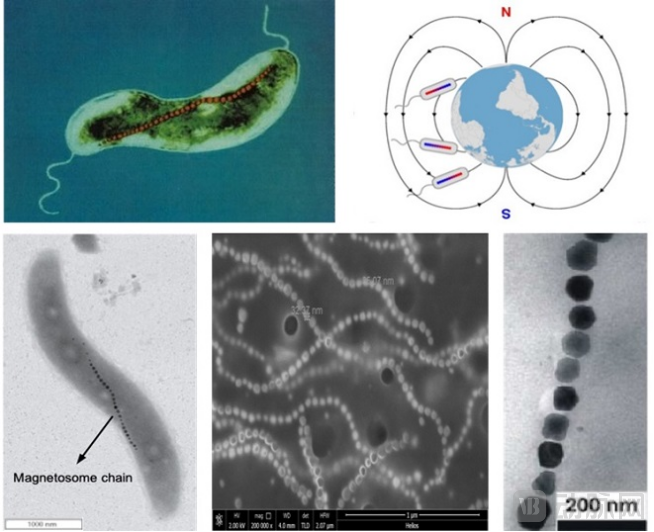 Magnetic Navigation in Magnetotactic Bacteria and the “Biological Compass” of Chain-Organized Magnetosomes (Image source: Hefei Institutes of Physical Science, Chinese Academy of Sciences)
Magnetic Navigation in Magnetotactic Bacteria and the “Biological Compass” of Chain-Organized Magnetosomes (Image source: Hefei Institutes of Physical Science, Chinese Academy of Sciences)
Magnetic microrobots based on human autologous cells typically utilize sperm cells, macrophages, and neutrophils as their foundational components, and are primarily applied in targeted cancer therapy, assisted fertilization, and immunotherapy. Compared with other types of magnetic microrobots, this class of products offers higher biosafety for in vivo applications and exhibits low immunogenicity.
II. Existing Microrobots Enter Clinical Practice
Although magnetic microrobots have attracted significant attention, they remain some distance from clinical adoption due to numerous unresolved research challenges. Nevertheless, this goal is not far off, as many types of microrobots are already being actively utilized in clinical settings.
Capsule Endoscopy RobotCapsule endoscopy robots are currently the most mature type of microrobots in clinical application. Since Israel’s Given Imaging received FDA approval for the first capsule endoscope in 2000, enabling its entry into clinical practice, companies such as Olympus in Japan have subsequently launched their own capsule endoscopy systems. Currently, China is at the forefront of the world in capsule endoscopy robot technology.
In 2021, Chongqing Jinshan Science & Technology (Group) Co., Ltd. went public.The World's First Fully Automated Capsule Robot RC100According to the company, this capsule endoscopy system requires no manual operation; after the patient swallows the NC100, a robotic arm automatically operates in coordination with the capsule to perform gastric examination. It not only delivers high-definition imaging but also leverages AI to process redundant images, thereby improving reading efficiency.

CN100 On-Site Operation (Image Source: Jinshan Technology)
In addition, there are miniature surgical robots designed for use in surgical environments. Although no such devices have yet been approved in China, precedents already exist overseas.
Israel's MicrobotViRob Robotic SystemIt is a type of autonomously mobile microrobot. It can be remotely controlled to navigate, rotate, and perform other maneuvers within narrow bodily cavities such as blood vessels and the gastrointestinal tract, and it can remain inside the human body for extended periods. Reportedly, ViRob can be widely used in interventional minimally invasive therapies, including neurosurgery, radiation therapy, and targeted drug delivery. Depending on specific clinical needs, it can carry various attachments, such as cameras or medications, to designated locations, thereby enabling more precise diagnostic and therapeutic assistance.
In addition, many microrobots are still in the preclinical stage. In 2021, focused on the development of microrobotsMicrobot MedicalIt was announced that LIBERTY, the world’s first fully disposable robotic system for neurovascular, cardiovascular, and peripheral vascular surgeries, has entered the preclinical stage. Additionally, the company has developed autonomous crawling microrobots for minimally invasive medical procedures and self-propelled endoscopic microrobots, both of which are currently undergoing animal trials.
 Microbot’s Autonomous Crawling Microrobot (Image source: Microbot)
Microbot’s Autonomous Crawling Microrobot (Image source: Microbot)
Overall, microrobots have begun to transition from initial conceptual fantasies to practical clinical applications. Although truly mature commercial products remain rare, the potential of such robots is gradually becoming evident. Undeniably, numerous challenges remain to be addressed in the development of microrobots. Collaborative efforts among experts in materials science, engineering, and medicine are essential to accelerate their clinical adoption and address critical healthcare needs.