MIT's 750-Milligram Bioinspired Microrobot Achieves Unprecedented Aerial Acrobatics with AI-Powered Control
Flying insects in nature, such as fruit flies, can easily perform high-difficulty maneuvers including abrupt stops, rapid turns (saccades), and aerial rolls, maintaining their agility even under sudden airflow disturbances. ThisExtraordinary flying capabilities have long been a target for roboticists to emulate.
However, by comparison, micro-robots of comparable scale can often only follow smooth trajectories with low acceleration, making it difficult to replicate the agility of insects.
Recently, in a study published in Science Advances by Yi-Hsuan Hsiao and colleagues from the Massachusetts Institute of Technology (MIT), researchers developed a robust tube model predictive controller based on deep learning,Successfully enabled a flapping-wing robot weighing only 750 milligrams to achieve unprecedented aerobatic flight capabilities.

(Source: Science Advances)
The robot not only set records for a flight speed of 197 cm/s and an acceleration of 11.7 m/s², but also completed 10 consecutive aerial flips within 11 seconds and withstood strong wind disturbances of up to 160 cm/s.
The publication of this study marks a milestone breakthrough in the flight agility of insect-scale robots, laying a solid foundation for the future autonomous applications of micro-robots.
Insect-scale flapping-wing robots typically refer to micro air vehicles with a mass of less than 1 gram and a wingspan in the range of a few centimeters. These robots exhibit extremely high flapping frequencies (typically exceeding 100 Hz) and very small moments of inertia (less than 100 g·mm²), which impose stringent requirements on their control systems.
On the one hand,Rapid dynamic characteristics imply that the robot is highly unstable,The controller is required to have an extremely high feedback frequency (often at the kilohertz level) to maintain attitude; on the other hand,Its minute size makes it highly susceptible to environmental interference,such as fluctuations in the surrounding airflow and tensile forces generated by power supply cables.
Furthermore, flapping-wing flight involves complex unsteady aerodynamic phenomena, such as vortex generation and shedding (Vortex Shedding), which makes it exceptionally difficult to accurately establish the robot’s dynamic model. Minor errors during manufacturing and assembly can also lead to significant uncertainty in model parameters.
For a long time, constrained by computational resources and model uncertainty, existing control methods (such as PID control or linear control) have typically been designed based on linearized models, enabling robots to perform only simple hovering or smooth trajectory tracking at low speeds (typically less than 40 cm/s).
When attempting high-acceleration aerobatic maneuvers or encountering strong disturbances, these controllers often lead to robot instability and crashes due to model mismatch or response lag. How to design a controller that can handle complex nonlinear dynamics and uncertainties while operating efficiently on computationally constrained micro-systems has become a core challenge urgently needing resolution in this field.
To overcome this bottleneck, the research team proposed an innovative “two-stage” control strategy that ingeniously combines the robustness of model predictive control (MPC) with the efficiency of neural networks.
In the first phase, researchers designed a“Expert-Level” Robust Tube Model Predictive Controller(Robust Tube Model Predictive Control, RTMPC). Unlike traditional MPC, RTMPC not only accounts for the nonlinear dynamic constraints of robots but also introduces the concept of a “tube”—that is, constructing a disturbance invariant set around the nominal trajectory. As long as the robot’s state remains within this “safety tube,” the controller can guarantee safe tracking of the target trajectory despite the presence of disturbances and model errors. However, RTMPC requires solving complex optimization problems online, resulting in a substantial computational burden that makes real-time implementation on micro-robots with limited computational resources challenging.
Therefore, in the second phase, the research team utilizedImitation Learning Technology, a lightweight neural network (Neural Network) was trained as a “student” controller to mimic the behavior of RTMPC.
To address the high cost of acquiring training data, researchers introduced a “Sampling Augmentation” method based on parameter sensitivity. By leveraging the safe tubes generated by RTMPC and computing the sensitivity matrix of optimal control inputs with respect to states, they rapidly generated a large number of state-action pairs within the tubes without repeatedly solving the optimization problem. This approach significantly improved the efficiency of data generation. The resulting neural network controller, comprising only two fully connected layers, operates at an extremely high frequency (1000 Hz) on a standard desktop CPU, perfectly replicating the performance of the expert controller.
In a series of highly challenging flight tests, the controller demonstrated remarkable performance.
When executing an insect-like “body saccade” maneuver, the robot must first accelerate to one side, then abruptly stop and change direction. Experimental data show that the robot’sThe maximum flight speed reached 197 cm/s, representing a 447% improvement over the previous best result for similar robots; the maximum lateral acceleration reached 11.7 m/s², an increase of 255%.
Even more astonishing is that the robotCompleted 10 consecutive aerial flips during an 11-second flight(Somersaults). This is a highly challenging maneuver, as the robot is in an underactuated state during the somersault and is highly prone to entanglement with the power supply cables.
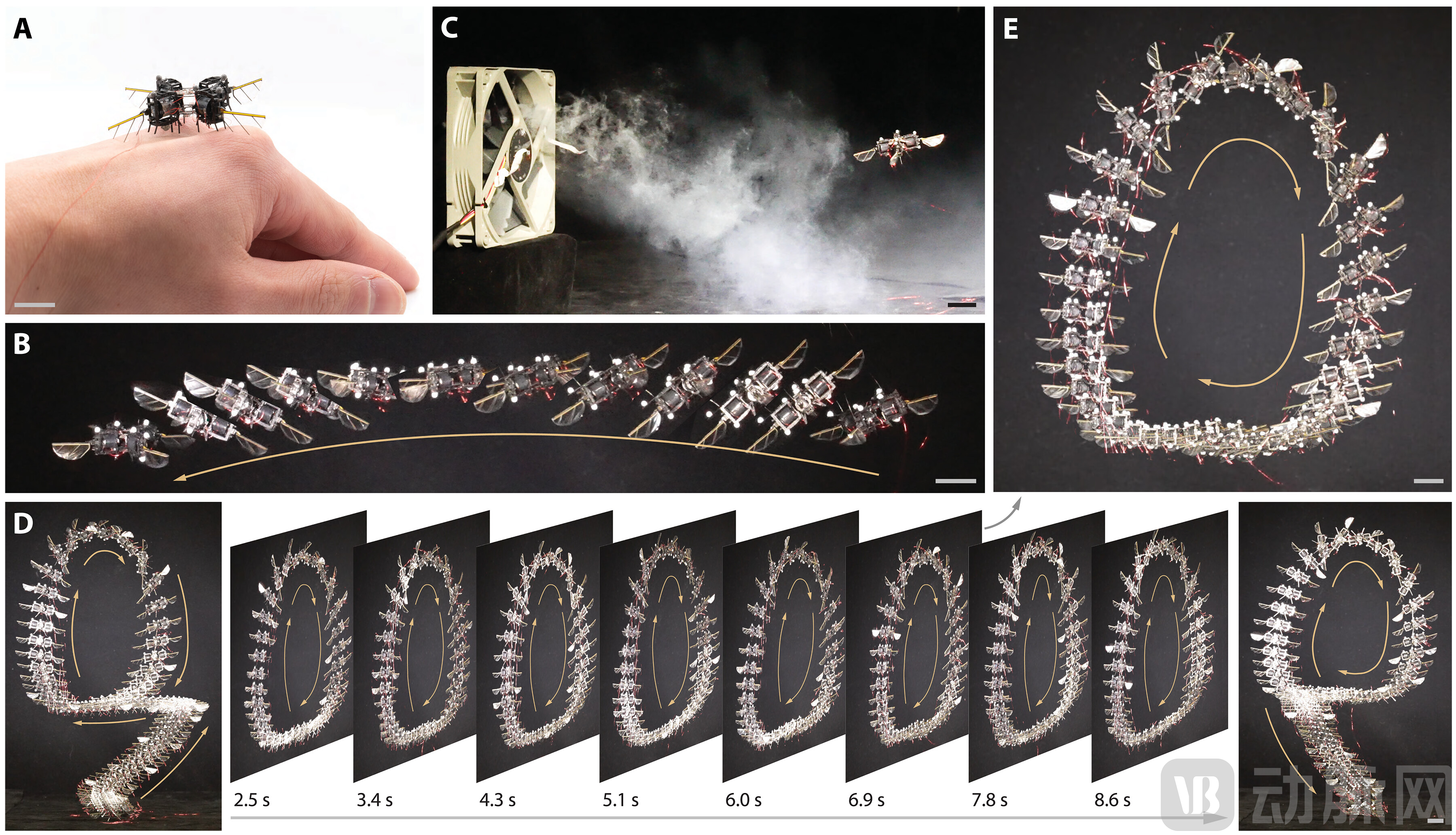
Figure: Flight maneuver trajectory of a 750-milligram flapping-wing flying robot (Source: Science Advances)
Thanks to the robustness of the controller, the robot maintained position errors within 2.5 centimeters even when thrust was disturbed due to power line entanglement. Furthermore, in wind-resistance experiments, the robot successfully executed high-difficulty maneuvers stably despite lateral wind disturbances of 160 cm/s (equivalent to the robot’s maximum flight speed) or a 33% thrust mapping error, demonstrating the method’s strong adaptability to model uncertainties and environmental disturbances.
This research achievement not only represents a monumental leap in the flight performance of insect-scale robots from an engineering perspective, but also holds profound significance at both theoretical and applied levels.
First, it strongly demonstratesSoft actuators, combined with advanced control algorithms, can fully match or even surpass the performance of traditional rigid motor-driven systems at the microscale.The robot’s dielectric elastomer actuators (DEAs) can drive the wings at a frequency of 330 Hz and generate substantial thrust variations within milliseconds, providing the hardware foundation for achieving highly agile flight.
Second, the study successfullyResolved the conflict between control complexity and computational cost,This study demonstrates the feasibility of “distilling” complex robust control strategies into lightweight neural networks via deep learning. Researchers found that even a minimalist neural network with only eight neurons can achieve stable aerobatic flight. This implies that such efficient controllers can be deployed on microcontrollers weighing merely tens of milligrams (such as STM32 chips), paving the way for fully computationally autonomous miniature robots.
Furthermore, the controller's strong robustness enables the robot to tolerate manufacturing variations.There is no need to perform tedious parameter identification for each robot.This is for the futureLarge-Scale Deployment of Micro-Robot Swarmsof great significance.
Looking ahead, with advancements in microsensor technologies (such as micro-IMUs, optical flow sensors, and time-of-flight sensors), combined with such efficient control algorithms, we can expect to seeInsect-Scale Robots with Fully Autonomous Perception and Decision-Making Capabilities.They will no longer rely on external motion capture systems; instead, like real insects, they will leverage their own sensors to navigate freely through narrow, complex, and even hazardous environments, performing tasks such as search and rescue, environmental monitoring, and industrial inspection. This research demonstrates the immense potential of microrobotics technology and brings us closer to creatingTrue Artificial InsectsOne step closer.