Penn Engineers Unveil Cent-Scale Autonomous Microrobots with Onboard Sensing, Computing, and Actuation
After nearly 40 years of exploration, the field of microrobotics has continued to face critical challenges:How to Achieve Full Information Processing Capabilities at the Submillimeter Scale.Existing microrobots either sacrifice autonomy by relying on external devices for motion control, or forfeit programmability, being limited to executing fixed tasks.
However, microorganisms in nature (such as paramecia) have demonstrated the feasibility of constructing autonomous intelligent systems at scales invisible to the naked eye, a fact that has fascinated roboticists for decades.
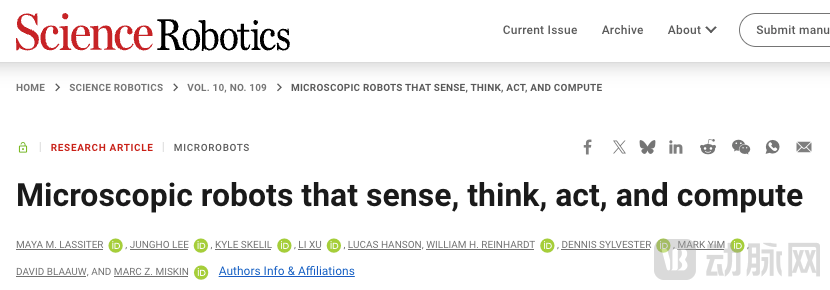
On December 11, 2025, Marc Z. Miskin’s team at the University of Pennsylvania published a breakthrough study in Science Robotics, demonstrating a device measuring only210 μm × 340 μm × 50 μm(microscopic robots approximately the size of a paramecium).
(Source: Science Robotics)
This robot integratesComplete systems encompassing sensing, programmable computing, memory, motion, and communication,Capable of, will haveAutonomously measures ambient temperature (accuracy: 0.3°C) and adjusts behavior based on sensor feedbackMiniaturized Microrobots with Full Autonomous Capabilities10,000-fold.
The development of microrobots has long been constrained by fundamental physical challenges arising from scale effects. As robot dimensions shrink to the sub-millimeter level, the performance of multiple critical systems undergoes superlinear degradation: leakage current in semiconductor circuits increases sharply, energy storage density drops significantly, wireless power transfer efficiency declines markedly, and macroscopic propulsion mechanisms become entirely ineffective. The compounding nature of these issues renders traditional miniaturization strategies for robots unsustainable at the sub-millimeter scale.
Specifically, the smallest robot currently equipped with a complete perception, programmable computing, and motion control system has a volume of1 cubic millimeterMoreover, this dimension was achieved more than two decades ago; further miniaturization of these early successful cases has been hindered by the laws of physics.
To circumvent these obstacles, existing microrobots typically adopt compromise solutions:Motion control via external hardware, at the expense of programmability, sensing capabilities, or autonomy.Even though a small number of microrobots integrate onboard electronic systems to enable unidirectional communication and open-loop motion, they remain unable to perceive their surrounding environment and lack the true computational architecture required to support programmable decision-making.
This limitation makes it difficult for microrobots to cope with unknown environments, and their reconfigurability after manufacturing is also extremely limited. AndIdeal microrobots should retain all the core characteristics of their macroscopic counterparts:Capable of perceiving the environment, computing decisions, supporting reprogramming, and manipulating or exploring the surrounding world.
To address the aforementioned challenges, the research team employed semiconductor manufacturing techniques to massively parallelize the construction of the robots’ bodies, actuators, and information systems. By optimizing circuits, actuators, and fabrication processes to align with microscale physical constraints, they successfully resolved each issue in turn.
The entire robot is adopted by commercial contract manufacturers.55-nm Complementary Metal-Oxide-Semiconductor (CMOS) ProcessManufacturing, utilizing sub-threshold digital logic at approximately100 nanowattsoperate within the power budget, the high threshold voltage of this process reduces transistor leakage current to a level sufficient to support various onboard circuits within sub-millimeter packages.
Within this minuscule volume, the research team has integrated a complete system comprising photovoltaic cells (for power supply), temperature sensors, control circuits for four actuators, an optical receiver (for downlink communication and programming), a processor, and memory. These sub-circuits have been optimized for size and power consumption.The processor consumed 93.2% of the robot's power,but accounted for only 26.0% of the area; in contrast,The energy harvesting system occupies 53.8% of the area, to compensate for the processor's power consumption requirements.
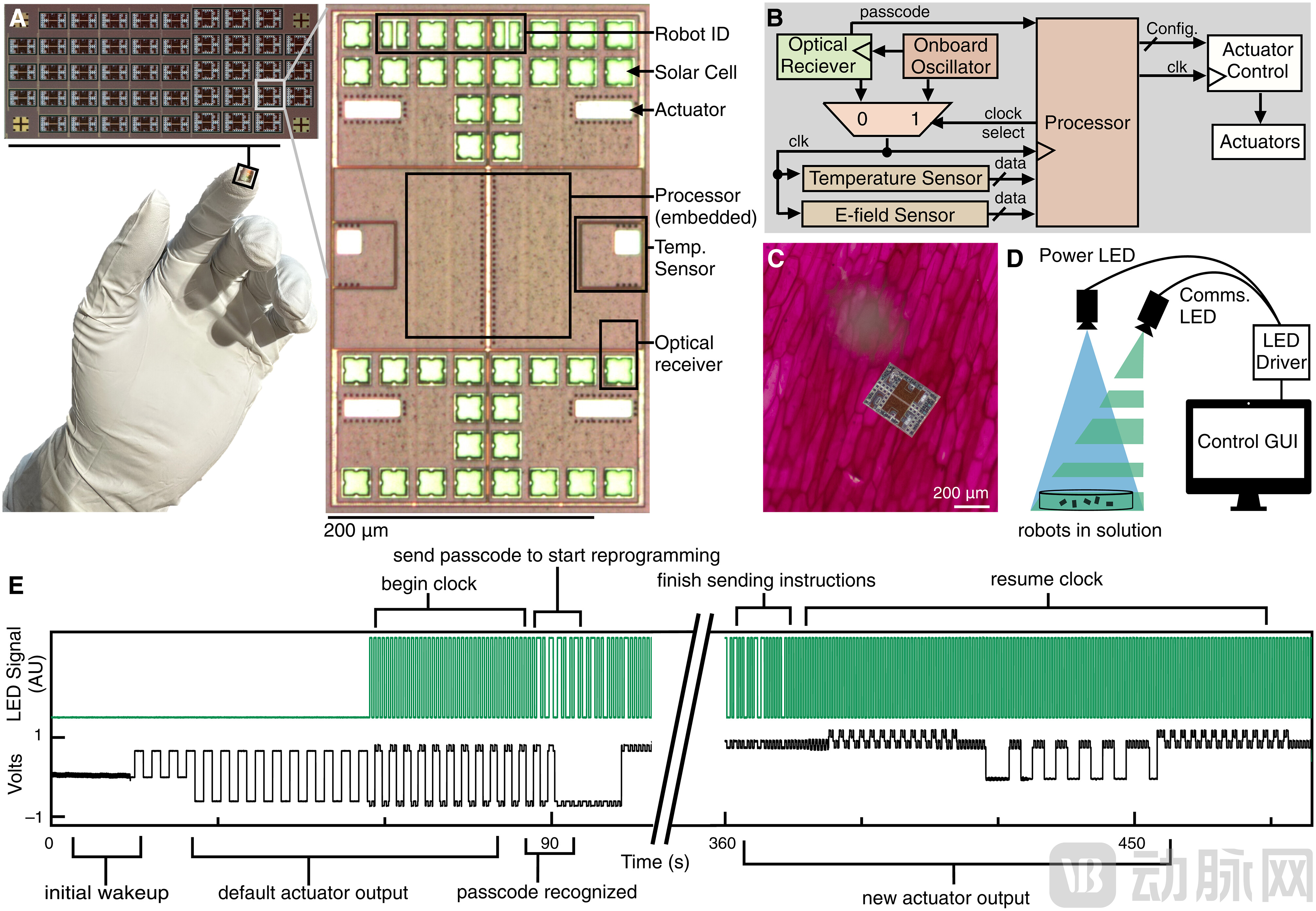
Figure: Overview of the microrobot circuitry (Source: Science Robotics)
To achieve digital control behavior under limited storage capacity, the research team designed a set ofCustom Complex Instruction Set Computer (CISC) Architecture, compressing useful robotic actions into specialized instructions such as "sense the environment" or "move for N cycles." This design is particularly well-suited for micro-robots, as it reduces the processor’s memory requirements without compromising functionality.
Specifically, the processor includes32 11-bit instruction memory locations, four 8-bit registers, and 16 8-bit data memory locations, the instruction set encompasses traditional arithmetic operations (addition/subtraction, bitwise operations, shifting), control flow (unconditional jumps and conditional branches), as well as robot-specific instructions (motion control [mot], temperature sensing [ts], communication [wav]). By employing a fully functional computer, the programmable memory defines both the instruction sequence and the robot’s internal state, enabling digital reconfiguration after manufacturing.
In terms of programming methodology, the robot receives programs via an optical communication link:One LED is used to power the onboard photovoltaic cell, while the other transmits data through flashing.The communication LED first transmits an initial illumination flash sequence (referred to as the "passcode"), instructing the robot to receive subsequent flashes as bits and write them into instruction memory. The research team designed two passcodes for each robot: a global passcode (common to all robots) and a type-specific passcode (addressable to specific subsets of robots), to prevent random light fluctuations from altering the robot's state. The programming process has been fully automated through a graphical user interface and custom circuit boards, enabling anyone to program the robots; however, once instructions are written to memory, the robots operate entirely autonomously without further user input.
In terms of exercise, the research team adoptedElectrodynamic Propulsion Mechanism, this is one of the few actuators that meet the low-current (<100 nA) and low-voltage (~0.1 to 1 V) requirements of onboard electronics. When the robot is immersed in a fluid, an electric current is passed between electrodes of opposite polarity. Mobile ions around the robot and nearby surfaces move in response to this electric field, driving fluid flow and thereby propelling the robot at a speed proportional to the applied electric field. By manipulating the electric field through spatially patterned active electrodes, the robot can move in different directions or steer, with a power consumption of approximately60 nW。
Experimental data show that the four-electrode robot has14 Unique ConfigurationsMotion generation is categorized into four types of movement: translation along the primary or secondary axis, rotation, and arc motion. Statistical data from 56 experimental trials indicate that the typical translational velocity is3–5 μm/s, turning speed is0.1 to 0.3 degrees/second. By concatenating arc movements, turns, and translations, the robot can track any user-specified path within a plane; the base station can send a sequence of actuator commands to the robot, which updates its motion upon receiving each message.
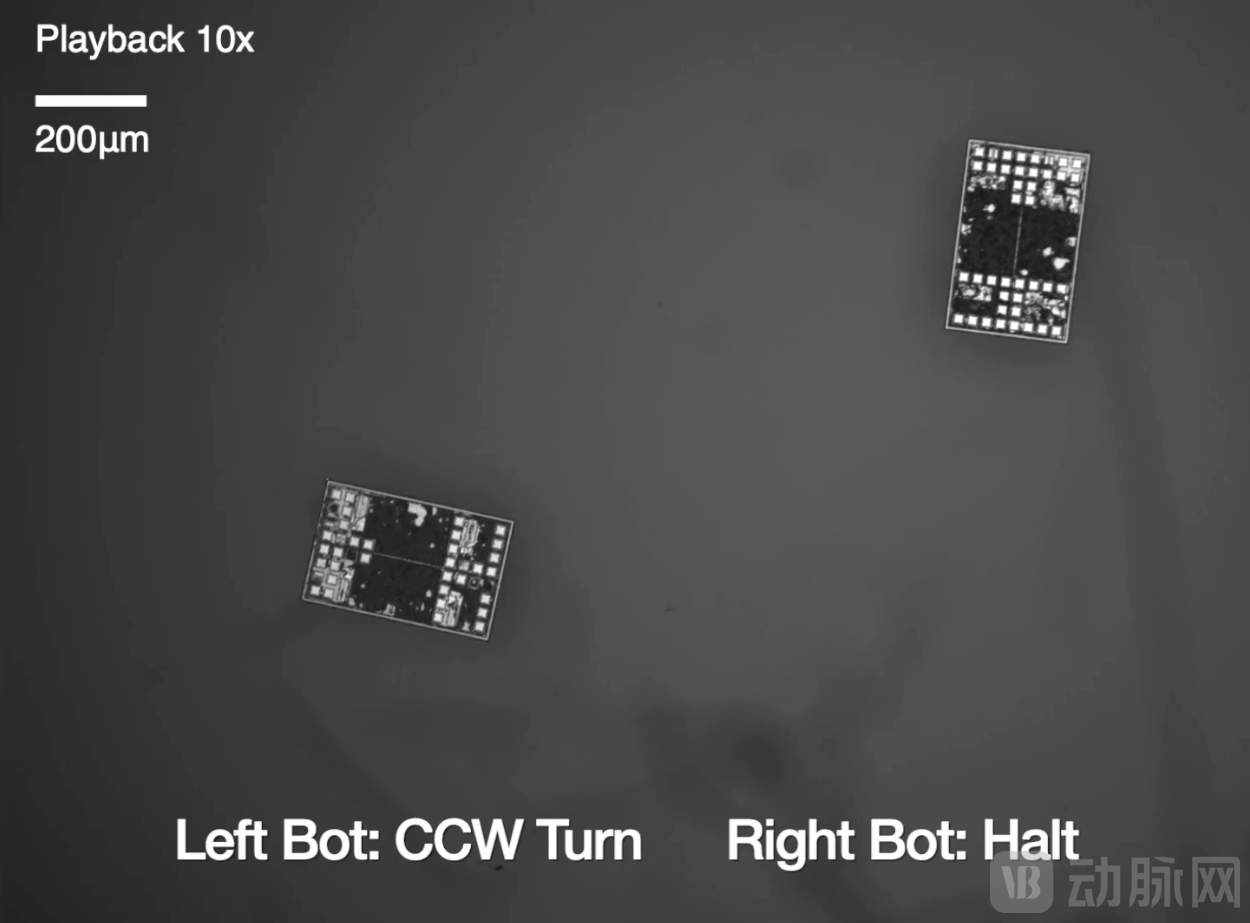
Figure: Demonstration of the robot’s motion (Source: Science Robotics)
More importantly, with the aid of an onboard computer, motion primitives can be directly translated into intelligent behaviors: robotic programs can autonomously switch between locomotion modes based on sensor data. The research team demonstrated two distinct closed-loop behaviors that enable the robot to adapt to temperature changes.
AtTime-Mode TaskIn this setup, the robot is programmed to measure temperature, digitize the readings, and transmit the results back to the base station by switching the polarity of the front-right actuator in a Manchester-encoded sequence. Due to the presence of a custom instruction set, most of this program is implemented using onlyTwo CommandsImplementation—“ts” handles sensing, while “wav” encodes and transmits data. In the experiment, the robot was placed in a cooling solution bath under passive heating, and the measurements reported by the robot were compared with synchronized readings from a thermocouple, revealing consistency between the two.Measurement resolution: approximately 0.3°C; deviation: approximately 0.2°C。
InSpatial Pattern TaskIn the study, the research team programmed the robot to climb temperature gradients. A thermoelectric heat pump was used to introduce a temperature gradient into the solution bath. The robot was programmed as follows: if the current temperature reading was lower than the previous one, it performed an arcing motion to search for warmer areas; if the temperature reading was warmer, it switched to a turning state, rotating in place without translation. Experimental results showed that the robot correctly rotated in place when there was initially no gradient; when the heat pump was activated to cool a local area, the robot switched to an arcing state and explored the workspace until it found a warmer area, at which point it resumed rotation; when the direction of the temperature gradient was reversed, the robot reverted to arcing motion and moved in the opposite direction.This adaptive behavior is executed autonomously by onboard sensors and software, without the need for external intervention.
The unique value of this study lies in achievingFully Programmable Autonomy and Local Sensor Feedback, which brings significant advantages to microrobots.
First, many existing microrobot platforms require large, specialized laboratory equipment (such as magnetic coils, ultrasonic transducer arrays, or cell culture environments), and this overhead limits their applicability, even if the cost of individual robots is low. In contrast, this study requires only a controllable light source for power supply and programming, as information processing is performed on the robots themselves, therebyAdvanced Functions Achieved with Standard Components。
Secondly, current microrobots capable of sensing or controlling movement can only perform fixed, design-specific tasks, whereas the robots in this study integrate a fully functional digital computer. This means that digital programming and onboard computing enable individual general-purpose microrobots to execute a range of tasks and be reconfigured on demand after manufacturing.
In terms of sensing performance, this microrobot also demonstrates superior advantages. Compared with existing state-of-the-art digital thermometers, the robot has a volume smaller than1 cubic millimeterprovided under the circumstances of0.3°C Resolution, Pareto superior to other solutions in the field—sensors that achieve higher resolution occupy at least an order of magnitude larger volume. Therefore, this sensor can detect thermal gradients on smaller spatial scales or within more constrained geometries (such as microfluidic chambers or capillaries).Combining the ability to explore confined spaces with high-precision temperature reporting, microrobots may be well-suited for life science measurements:The robot can adapt to submillimeter spaces, record with sub-1°C precision, cover the entire temperature range of mesophilic cell biology, and reposition over time as cells grow, die, or remodel.
Even more encouraging is the manufacturing cost advantage. When produced at scale, each microrobot in this study costs approximately$0.01($0.01). The robots used in the study were purchased from Fujitsu as part of a multi-project wafer run at approximately $10,000 per square millimeter, yielding about 100 chips, each containing roughly 100 robots, resulting in a cost of approximately $10 per robot. However, scaling up to mass production would significantly reduce costs, making $0.01 a realistic estimate for commercial products.
Although the preliminary robot presented here requires further advancements (such as new actuators or energy transmission schemes) to achieve long-term goals, its circuitry and computer architecture have already laid a solid foundation for future development. For example, by adopting more advanced process nodes, onboard memory can be increased by approximately100x(Provided that the threshold voltage remains sufficiently high to suppress leakage current), this will facilitate more complex programs (approaching thousands of lines of code) and more sophisticated autonomous behaviors. Building on existing work, programs can now uniquely identify individual robots through integrated passcodes; even in the absence of direct inter-robot communication, this allows a central controller to assign different tasks or simulate multi-agent coordination. By driving and measuring currents in solution, the circuits can enable spatial localization or fluid-mediated communication. Subcircuits optimized for propulsion can increase robot speed by tenfold or drive other electronically integrated actuators suitable for harsh environments, such as in vivo operations.
This study leverages semiconductor manufacturing technology to endow microrobots with capabilities for sensing, cognition, and autonomous action, reducing the volume of fully autonomous robots by a factor of 10,000.The combination of versatility, ease of use, and low cost enabled by onboard information processing,It may find applications in fields ranging from the physics of living systems to nanofabrication, microsurgery, and drug delivery.
In the future, more advanced electronically integrated microrobots canPlays a role in targeted drug delivery,Drug release is triggered by local sensor cues (such as biochemical markers or temperature changes) rather than global commands; in telemetry, onboard computing can digitally encode data to make communication more robust against noise; in nanofabrication, programmable microrobots can receive, monitor, and update instructions during operation using passcode-based communication.