MicrolGT-RoboC: China's First Sub-Millimeter Precision Dynamic-Needle CT-Guided Robotic System for Percutaneous Biopsy Receives Innovative Medical Device Approval in Zhejiang (2026)
Recently, the National Medical Products Administration (NMPA) approved the registration application for Hangzhou Weiyin Technology Co., Ltd.’s (hereinafter referred to as “Weiyin Technology”) CT-Guided Puncture Surgery Positioning System (National Medical Device Registration No. 20263010251). In October 2024, this product entered the “Green Channel” for special review of innovative medical devices.This timeApproved needle-insertion surgical robot products are primarily used for positioning and insertion control of needles during CT-guided percutaneous procedures in the lungs and abdomen of adult patients.
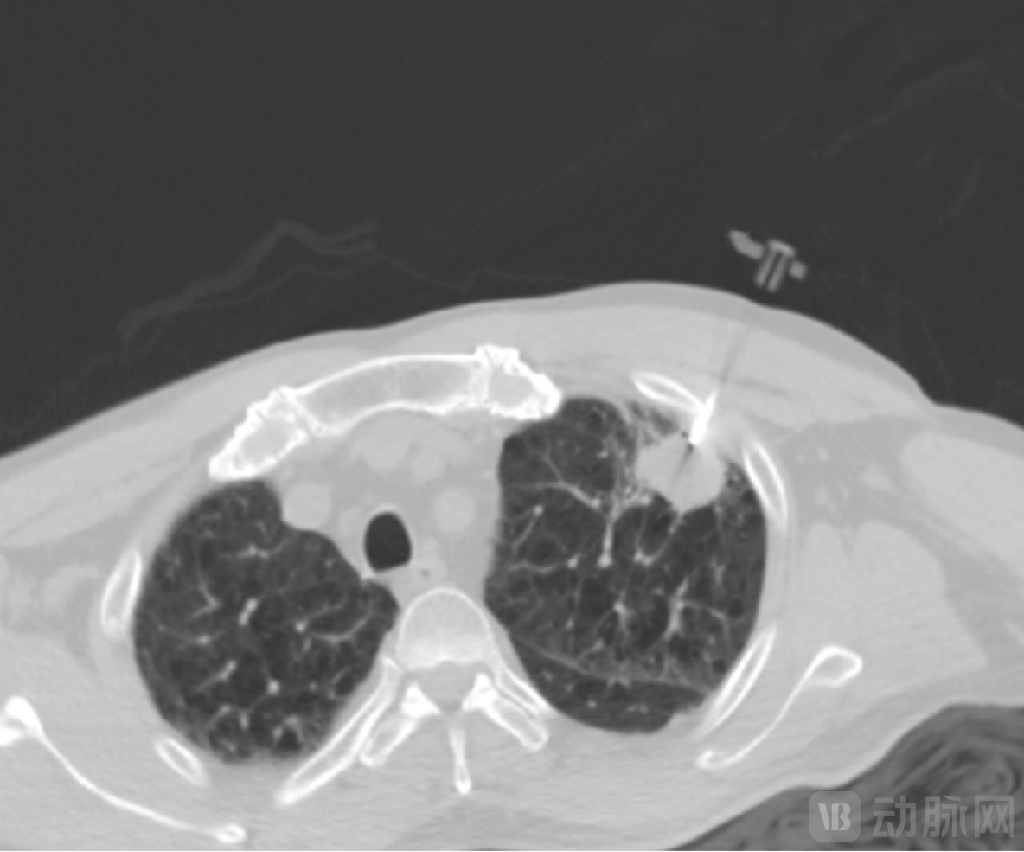
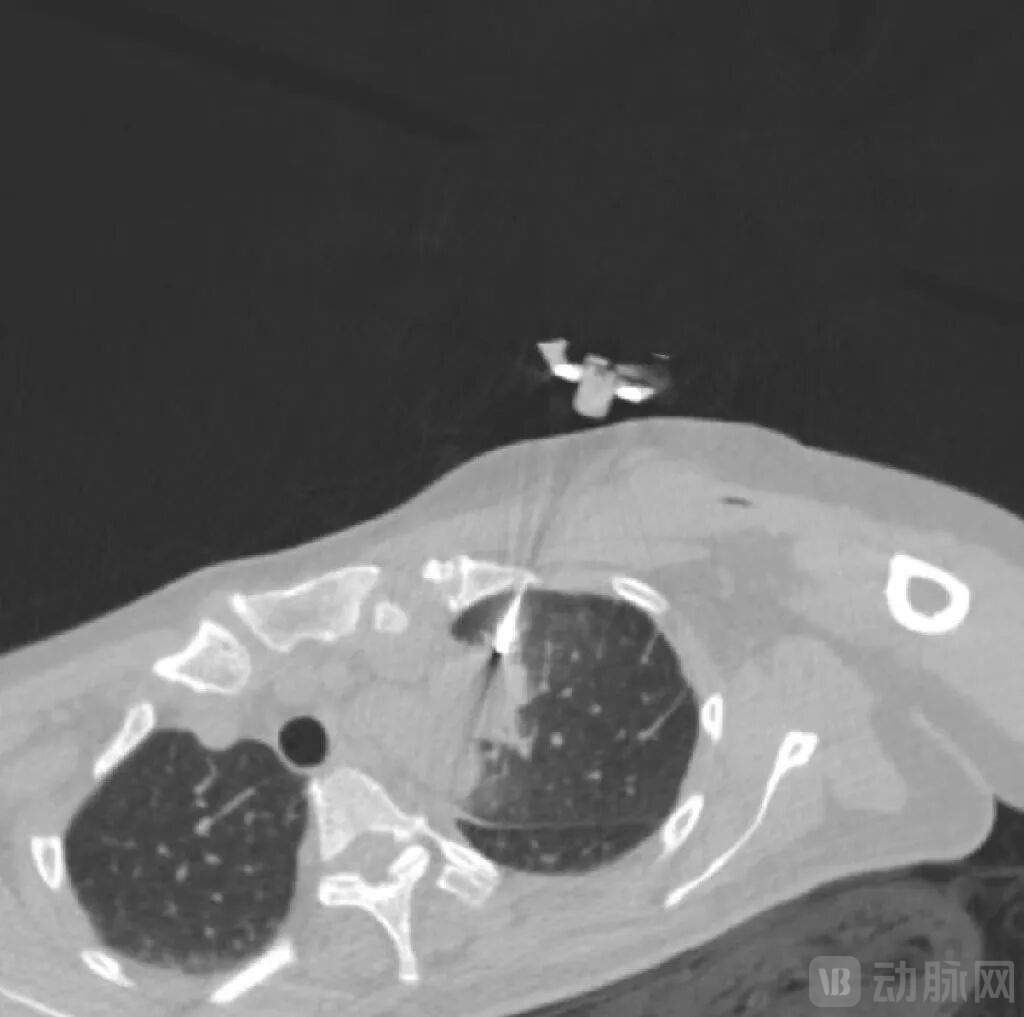
 MicrolGT-RoboC Puncture Surgical Robot by MicroGuide Technology. Image source: WeChat Official Account of MicroGuide Technology
MicrolGT-RoboC Puncture Surgical Robot by MicroGuide Technology. Image source: WeChat Official Account of MicroGuide Technology
Traditional percutaneous puncture procedures heavily rely on the operator’s subjective experience and tactile feedback, often failing to establish standardized operational protocols. Furthermore, these procedures require physicians to possess strong spatial imagination of three-dimensional anatomical structures, resulting in a prolonged learning curve. Consequently, substantial clinical demands remain unmet. Patient movements, such as respiration, frequently cause lesion displacement, making it difficult to accurately locate small lesions. This leads to low precision and a low rate of successful first-attempt punctures. Repeated puncture attempts may result in complications such as pneumothorax, pulmonary hemorrhage, hemoptysis, and hemothorax.
The advent of percutaneous puncture surgical robots aims to address the aforementioned challenges by providing clinicians with more precise solutions for puncture procedures, thereby resolving the “last centimeter” difficulty in accurate percutaneous interventional diagnosis and treatment. These are surgical robots that utilize imaging modalities such as MRI, CT, and ultrasound to locate target anatomical positions, guide and provide feedback on needle advancement to the lesion, and assist in completing percutaneous punctures. In biopsy procedures, percutaneous puncture surgical robots can accurately obtain tissue samples from lesions for further pathological examination and other operations. Currently, they are primarily used for early tumor detection, with indications covering lung cancer, breast cancer, prostate cancer, and others. Furthermore, they are compatible with various therapeutic approaches, including puncture-based chemotherapy drug injection, drainage, radiofrequency ablation, microwave ablation, cryoablation, argon-helium knife ablation, and irreversible electroporation (nanoknife).
As previously mentioned, for puncture surgical robots, the core challenge lies in effectively addressing the “dynamic target” problem caused by physiological movements such as respiration and heartbeat, thereby achieving sub-millimeter precise puncture of organs that move with breathing, such as the lungs and liver. This requires surgical robots to possess extremely high static positioning accuracy, as well as intelligent capabilities for real-time perception, dynamic tracking, and active compensation, resulting in relatively high technical barriers. To better address these challenges, MicroGuide Technology has implemented a strategic layout of multiple patented technologies:
 Technical patents related to puncture surgical robots held by Weiyin Technology; Data source: China National Intellectual Property Administration; Graphic by VCBeat
Technical patents related to puncture surgical robots held by Weiyin Technology; Data source: China National Intellectual Property Administration; Graphic by VCBeat
Specifically, to address the positioning issues caused by patient respiratory motion, the solution proposed in WeiYin Technology’s “A Navigation System for Puncture Ablation Surgery Under Dual Guidance of CT and AI” involves configuring a displacement compensation module connected to a 3D organ model establishment module. This system determines the displacement generated during patient respiration via a positioning disc placed on the patient’s body and corrects organ displacement based on the movement of said positioning disc. Furthermore, the configured positioning module achieves real-time localization of the puncture needle through an electromagnetic generator and sensors mounted on the needle, while implementing respiratory compensation via the positioning disc on the patient’s body to perform secondary calibration of the puncture needle. Meanwhile, respiratory motion may also cause artifact issues, leading to degraded imaging quality. In “A Respiratory Gating System for Percutaneous Lung and Pulmonary Puncture,” WeiYin Technology employs a stereoscopic vision measurement unit (binocular camera or depth camera) to acquire multiple frames of patient images, detects fluctuation feature points based on changes between consecutive frames, and processes this data further to obtain a respiratory cycle curve, thereby resolving artifact issues without the need for fiducial markers.
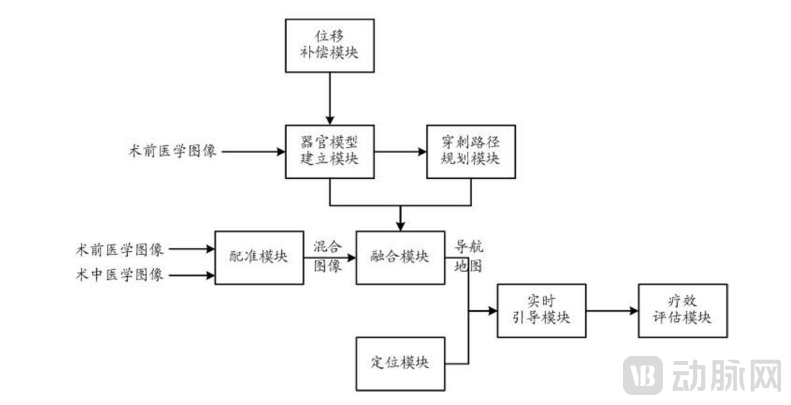 Source: China National Intellectual Property Administration
Source: China National Intellectual Property Administration
Regarding the selection of puncture paths, current practices largely rely on computer simulations to identify the optimal percutaneous puncture path from multiple feasible options. However, errors still occur during actual execution, potentially causing injury to dangerous areas within the human abdomen. Based on its "Real-Time Stepwise Percutaneous Puncture Planning System" (an intraoperative planning system), MicroGuide Technology aligns preoperative and intraoperative images acquired at different time points through a real-time 3D image registration module. This enables monitoring of the discrepancy between the needle’s actual position in the images and the corresponding planned point along the planned trajectory at various stages of the puncture process. Consequently, the system calculates in real time the spatial angular adjustments required to accurately reach the final target. Furthermore, it provides dynamic safety range alerts to facilitate safer and more effective performance of puncture procedures.
During surgery, positioning accuracy determines whether the robotic system can precisely align with the lesion in accordance with the surgeon’s maneuvers. In “A Method for Detecting the Accuracy of Puncture Surgical Robot Systems,” MicroGuide Medical addressed the challenge of measuring system accuracy through a laser positioning system.
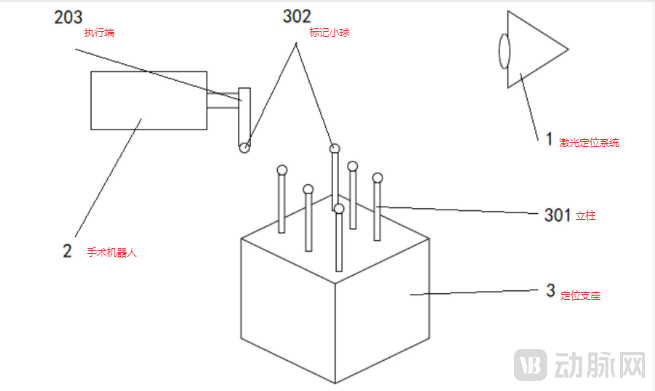 Image source: China National Intellectual Property Administration; labels added based on patent descriptions
Image source: China National Intellectual Property Administration; labels added based on patent descriptions
Leveraging its patent portfolio and accumulated corporate strength, the company ultimately brought the puncture surgery robot to market.
Looking at the MicrolGT-RoboC, the puncture surgery robot from MicroGuide Technology that has recently received approval, its main features are as follows:
① Integrates “navigation + positioning + puncture” to achieve full-process automation.MicroIGT-RoboC adopts a CT- and AI-guided percutaneous puncture robotic system. By leveraging its independently developed “navigation + positioning + puncture” surgical system, it addresses key challenges in CT-guided percutaneous biopsy procedures, including the lack of real-time imaging visualization of the needle, patient respiratory deformation, and the reliance on empirical estimation for puncture range and duration. The system achieves a complete closed-loop workflow encompassing real-time image acquisition, intelligent path planning, and automated execution by the robotic arm. Furthermore, its self-developed high-precision, long-axis robotic arm is designed for use within the CT gantry, effectively overcoming associated artifact issues.
② Real-time surgical navigation and assessment based on stepwise puncture.Compared with puncture methods such as “blind puncture,” stepwise puncture (i.e., phased, small-step advancement with real-time confirmation during needle insertion) can significantly enhance the safety and success rate of the procedure, thereby reducing the risk of complications for patients. Unlike preoperative planning, WeiYin Tech provides intraoperative planning, which will substantially transform the current landscape of puncture procedures.
③ Features 3D reconstruction-based visualization for puncture path planning and sub-millimeter positioning technology.MicrolGT-RoboC provides high-precision percutaneous intervention solutions. By leveraging technologies such as 3D reconstruction-based visualization for needle path planning and robotic arm positioning, it achieves sub-millimeter puncture accuracy. As a surgical system capable of dynamic intraoperative needle insertion, it maintains precise needle advancement even during respiratory motion, thereby effectively mitigating the impacts of soft tissue deformation and respiratory fluctuations in puncture procedures involving organs.
④ It can shorten surgical time and reduce the risks associated with complications and excessive radiation exposure.MicroIGT-RoboC can significantly shorten surgeons’ operative time, assist them in mastering puncture techniques more rapidly, and improve surgical efficiency. Clinically validated, it markedly reduces patients’ CT scan duration and frequency, thereby lowering the incidence of adverse events. Furthermore, its support for remote console operation effectively reduces radiation exposure.
According to information disclosed by MicroIGT in February 2025, clients collaborating on the MicroIGT-RoboC project include Fudan University Shanghai Cancer Center, Zhejiang Cancer Hospital, Nanjing Medical University, Huashan Hospital, Changhai Hospital, The Second Affiliated Hospital of Anhui Medical University, and Xiangya Second Hospital of Central South University, among others.
Image source: Weiyin Technology official account
A patient case demonstrated that, in scenarios where the lesion was adherent to the aorta, the MicrolGT-RoboC system performed trans-layer puncture planning, automatically calculating the needle insertion site and angle to accurately reach the lesion.
RoboC Planning and Execution Diagram,Image source: Weiyin Technology official account
In terms of market size, a research report by Debon Securities pointed out that the global market for percutaneous surgical robots was valued at USD 380 million in 2020. In China, the total number of such procedures performed in 2020 was approximately 23,000, with a market size of USD 20.8 million. According to Frost & Sullivan, the installed base of percutaneous surgical robots in China stood at 20 units in 2020 and is projected to increase to 244 units by 2026, with the market size growing from RMB 140 million to RMB 1.71 billion.
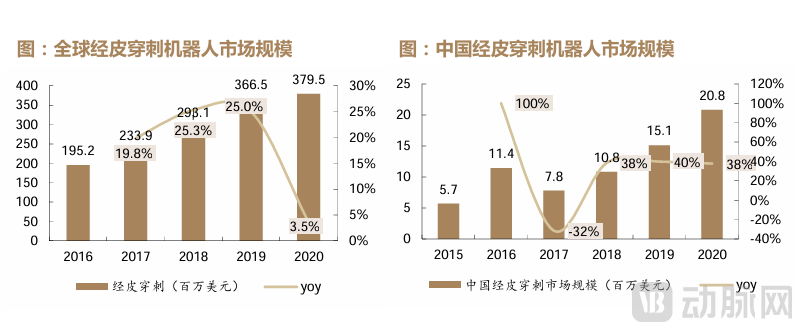 Source: Sealand Securities, “In-Depth Analysis of the Surgical Robotics Industry: A Revolutionary Medical Technology Poised for Takeoff in the Chinese Market”
Source: Sealand Securities, “In-Depth Analysis of the Surgical Robotics Industry: A Revolutionary Medical Technology Poised for Takeoff in the Chinese Market”
This sector is also attracting rapid deployment by domestic companies. As needle-insertion surgical robots have been applied relatively early in China, there are already dozens of products available on the market. Companies active in this space include MicroGuide Technology, Jingmai Medical, Zhenjiankang Medical, Tuodao Medical, AirMed, Ruitouch Robotics, Ganavie Medical, Vede Precision Medicine, Yida Jixing Medical, Aimite Intelligence, Zhuoye Medical, United Imaging Intelligent Healthcare, Hengle Medical, and Longdianjing Intelligent Technology.
Current policies are further benefiting the development of sectors such as surgical robotics. In late January, the National Healthcare Security Administration officially released the “Guidelines for Establishing Price Items for Surgical and Therapeutic Assistance Services (Trial)” (hereinafter referred to as the “Establishment Guidelines”). These guidelines establish unified pricing items for medical technological innovations, including 3D printing, tracer-enhanced imaging, energy-based devices, intraoperative image guidance, robotic arms, and remote surgery, with the aim of guiding the transition of medical technologies toward “precision medicine.” Industry practitioners view the “Establishment Guidelines” as a critical breakthrough in the commercialization of high-end medical technologies such as surgical robots. Centered on the core concept of “assistance operations,” the guidelines have established a unified, interoperable, and scalable reimbursement system.
Driven by surging market demand and supportive policy guidance, products such as puncture surgical robots are poised for further market expansion and accelerated commercialization.
About Weiyin Technology
Hangzhou Weiyin Technology Co., Ltd. was established in June 2020 and is one of the few robotics companies worldwide with comprehensive capabilities in image-guided interventions across CT, ultrasound, and magnetic resonance imaging (MRI). The company focuses on empowering medical imaging equipment with automation, intelligence, and platform-based capabilities.
As of May 20, 2025, the company holds 40 patents and software copyrights (including pending applications), has participated in one key national special project under the Ministry of Science and Technology, and serves as the sole enterprise responsible for the commercialization of the project’s outcomes. The company operates a 1,500-square-meter R&D and production base in Shanghai and Hangzhou, and has established an innovation R&D center in the United States.